Опрос
|
реклама
Быстрый переход
Переломного «ChatGPT-момента» в сфере человекоподобных роботов придётся ждать ещё до 10 лет
30.03.2026 [17:59],
Алексей Разин
Пока специалисты спорят о правомерности использования термина «искусственный интеллект», мало кто может усомниться в существенном влиянии выхода ChatGPT осенью 2022 года на отрасль информационных технологий и мировую экономику в целом. Производители человекоподобных роботов считают, что для них такой прорыв станет возможен ещё через два или десять лет. 
Источник изображения: UBTech Robotics По крайней мере, подобные оценки приводили выступавшие на конференции Boao Forum эксперты, на которых ссылается Channel News Asia. Председатель правления Daxiao Robotics Ван Сяоган (Wang Xiaogang) считает, что подходящий момент для прорыва в развитии человекоподобных роботов наступит уже через пару лет: «Мы должны масштабировать данные до существенно более высокого уровня, и благодаря применению моделей мира и симуляции сможем ускорить этот процесс». Такой подход к обучению робототехнических систем пропагандирует и основатель Nvidia Дженсен Хуанг (Jensen Huang), который призывает использовать цифровые двойники для симуляции физических процессов и ускорения прогресса в сфере робототехники. Глава робототехнического подразделения Vivo Шао Хао (Shao Hao) считает, что до прорыва в области применения человекоподобных роботов пройдёт около десяти лет. По его словам, проблемой отрасли является отсутствие достаточного количества данных из реального мира с приемлемой стоимостью, которые могли бы использоваться для обучения роботов применению во всём многообразии окружающего мира. Участники рынка сходятся во мнении, что одномоментно никаких прорывов происходить не будет, отрасль будет развиваться поэтапно и постепенно, добиваясь эволюционных изменений в разных сферах. В этом году китайские разработчики впечатлили публику демонстрацией хореографических и акробатических способностей человекоподобных роботов во время большого новогоднего концерта, который транслировался на всю страну. Роботы демонстрировали приёмы единоборств и исполняли акробатические трюки, но специалисты признают, что эти движения были заучены на примере живых хореографов, а сама презентация проходила в строго статичных и предсказуемых условиях. Чтобы роботы смогли уверенно и безопасно действовать в реальной бытовой обстановке, их нужно ещё очень долго обучать. Доступ к достаточному объёму дешёвых данных для такого обучения может стать «узким местом» для всей робототехнической отрасли в ближайшее время, как сходятся во мнении участники рынка. Кроме того, кинетические способности роботов всё ещё требуют совершенствования, у них есть проблемы со стабильностью и надёжностью. Определённые барьеры предстоит преодолеть и в общественном сознании с точки зрения доверия к роботам, которые будут функционировать бок о бок с людьми. Приглашённая на мероприятие в Китае бывшая премьер-министр Новой Зеландии Дженни Шипли (Jenny Shipley) заявила, что от роботов люди не должны ожидать способности делать эмоциональные суждения. По её мнению, в их задачи это входить не должно. Определённую подготовку к массовому применению человекоподобных роботов следует провести на уровне стандартов безопасности и социальной политики. Если роботы будут заменять людей в целом ряде профессий, высвобождающимся человеческим ресурсам необходимо будет найти достойное применение. Кроме того, активный сбор визуальной звуковой информации, который необходим роботам для сосуществования с людьми в одном пространстве, не должен представлять угрозы для информационной безопасности. Сингапур в этой сфере уже предложил рамочные правила для регулирования применения ИИ-агентов, и робототехническая отрасль может последовать этому примеру. Бывшая премьер-министр Новой Зеландии добавила, что её в условиях бурного развития ИИ беспокоит непрозрачность структуры управления и распределения ответственности: «Я не знаю, кто сейчас за рулём. Я понимаю, что кто-то управляет процессом, но не могу понять, кто именно». По её словам, при массовом распространении человекоподобных роботов важно обеспечить социальную стабильность во всех странах, поскольку бесконтрольное внедрение таких технологий чревато социальными и экономическими потрясениями. Amazon поглотила стартап Fauna — он выпустил домашнего робота размером с ребёнка
25.03.2026 [14:51],
Павел Котов
Amazon сообщила, что приобрела молодую компанию Fauna Robotics. Стартап, основанный два года назад бывшими инженерами Google и Meta✴✴, успел выпустить предназначенного для дома человекоподобного робота Sprout размером с ребёнка. 
Источник изображения: faunarobotics.com Условия сделки не разглашаются. Известно, что сотрудники Fauna, в том числе двое основателей, начнут работать в филиале Amazon в Нью-Йорке. «Нас восхищает, каким Fauna видит создание функциональных, безопасных и интересных роботов для всех. Учитывая наработки Amazon в области робототехники и многолетний опыт завоевания доверия клиентов в области розничной торговли и производства устройств, мы хотим изобретать новые способы делать жизнь наших клиентов лучше и проще», — приводит ресурс TechCrunch заявление представителя Amazon. В начале этого года Fauna объявила о начале поставок своего первого двуногого робота Sprout массой 26,76 кг — его получили партнёры стартапа по исследованиям и разработке. Для Amazon это второе поглощение робототехнической компании только в этом месяце — ранее гигант электронной коммерции сообщил о покупке цюрихского разработчика Rivr, который построил машину, способную подниматься по лестнице. Условия этой сделки также разглашать не стали. ИИ позволили творить, и он создал робота-терминатора — неказистого, но неубиваемого
22.03.2026 [01:14],
Геннадий Детинич
Учёные из Северо-Западного университета (Northwestern University) в США провели уникальное исследование в робототехнике, применив искусственный интеллект для дизайна роботов на основе алгоритмов эволюционного развития. Вместо традиционного инженерного подхода — подготовки ТЗ и проектирования — они использовали алгоритмы, которые быстро перебрали миллионы вариантов, отобрав наиболее успешные с позиции естественного отбора. И это сработало. 
Источник изображений: Northwestern University ИИ в симуляторе тестировал варианты конструкций в сложных условиях: с препятствиями, получением увечий и в процессе случайного перебора среды для передвижения. В итоге появлялись необычные, часто неочевидные для человека сборки и варианты передвижения, которые обеспечивали конструкциям максимальную подвижность и выживаемость.  В итоге алгоритм представил модульные «метамашины с ногами» (legged metamachines) — роботов, собранных из автономных блоков, каждый из которых сам по себе являлся полноценным мини-роботом с мотором, батареей и компьютером. Утверждается, что эта работа стала первым случаем, когда эволюционировавший исключительно в виртуальной среде робот успешно шагнул в реальный мир и показал не имеющую себе равных способность подстраиваться к различным условиям.  Каждый модуль такого робота имеет простую конструкцию: центральный шар с двумя вращающимися «ногами-руками», что позволяет ему самостоятельно катиться, прыгать или вращаться. При соединении нескольких модулей (подобно деталям детского конструктора) можно создать сложные конфигурации — от четвероногих форм до пресмыкающихся или таких структур, которым нет описания в реальном мире.  Самое впечатляющее свойство эволюционировавших роботов — это невероятная сложность уничтожить их. Механизмы продолжают двигаться даже после серьёзных повреждений: потери одной или нескольких «ног», разрезания пополам или даже на множество частей. В таких случаях оставшиеся модули мгновенно перестраиваются, меняют походку или продолжают путь как отдельные «особи». Они продолжают двигаться как расчленённый Терминатор из одноимённой франшизы — медленно, неказисто, но неотвратимо. И это довольно жуткое зрелище. Как видно на видео, робот способен переворачиваться со спины на ноги, преодолевать траву, неровности и грязь. По сравнению с обычными роботами, которые выходят из строя при потере даже одной детали, спроектированные ИИ метамашины демонстрируют принципиально иной уровень живучести и отказоустойчивости. Хотя скорость и изящество движений разработки пока остаются невысокими, исследование открывает перспективы для создания автономных систем будущего. Такие модульные и неубиваемые роботы могут найти применение в спасательных операциях, исследовании экстремальных сред (космос, глубины океана, зоны катастроф), особенно при выполнении задачи роем. Пока они слепы и не видят окружение, но учёные пообещали исправить эту недоработку и снабдить их датчиками, чтобы они понимали и обнаруживали свою цель. Пустить сотню таких по ночному лесу и отдать управление ИИ… Страшно даже представить. Роботы научились реагировать на ошибки быстрее человека — с помощью человеческого мозга
19.03.2026 [21:04],
Геннадий Детинич
Учёные из Университета штата Оклахома (Oklahoma State University) разработали нейроадаптивную систему управления роботами, которая использует сигналы человеческого мозга для мгновенной реакции на ошибочные операции полуавтономных платформ. В коре головного мозга во время осознания ошибок возникают специфические сигналы, которые могут стать «стоп»-словом для робота, остановив его до отдачи команды оператором по обычным каналам. 
Источник изображения: Oklahoma State University Система основана на регистрации так называемых потенциалов, связанных с ошибкой (error-related potentials, ErrP), — специфических электрических паттернов, возникающих в передней поясной коре мозга в момент осознания человеком ошибки. Эти сигналы появляются быстрее, чем человек успевает физически отреагировать на ошибочное действие, что позволяет роботу получить «раннее предупреждение» задолго до того, как ошибка приведёт к серьёзным последствиям. Для считывания сигналов ErrP был применён классический ЭЭГ-шлем для снятия электроэнцефалограммы, который фиксировал мозговую активность оператора в реальном времени. Полученные данные передавались в систему совместного управления роботом: при обнаружении ErrP робот мог мгновенно замедлить движение, полностью остановиться или передать управление обратно человеку. Важной особенностью разработки стала адаптивная модель декодирования сигналов, которая сначала изучает общие паттерны мозговой активности, а затем быстро подстраивается под индивидуальные особенности конкретного пользователя, существенно сокращая время калибровки. Технология особенно полезна в ситуациях работы в непредсказуемой обстановке с повышенным риском и опасными последствиями, когда традиционное дистанционное управление может слишком медленно отреагировать на ошибочное действие робота, что приведёт к разрушительным последствиям. Например, это могут быть работы по демонтажу ядерных объектов, глубоководные исследования или телемедицина. Более того, в перспективе подобный «предохранитель» может оказаться полезным для управления протезами и экзоскелетами, которые смогут самостоятельно корректировать действия на основе намерений и реакций пользователя и не допускать ошибочных решений. Способность мозга значительно быстрее осознавать ошибочные действия до того, как на них среагирует вся цепочка нервной системы человека до кончика пальца на кнопке «Стоп», может сохранить дорогостоящее роботизированное оборудование от поломок и предотвратить фатальные ошибки при работе с объектами обслуживания. Робопсы нашли работу в дата-центрах — они проверяют оборудование, ищут перегрев и патрулируют ЦОД
17.03.2026 [12:22],
Алексей Разин
Крупные центры обработки данных обладают не только обширной территорией, но и разнообразным оборудованием, за состоянием которого необходимо тщательно следить. Когда камер и датчиков для решения подобных задач не хватает, конкуренцию людям могут составить собакоподобные роботы. 
Источник изображения: Boston Dynamics Старший директор по управлению продуктами Boston Dynamics Мерри Фрейн (Merry Frayne) призналась, что интерес к таким роботам со стороны компаний, занимающихся строительством центров обработки данных, по сравнению с прошлым годом заметно вырос. Аналогичные роботы уже применяются в нефтяной и горнодобывающей промышленности, в военных операциях и при ликвидации последствий стихийных бедствий. С учётом масштабов строительства ЦОД в США, применение собакоподобных роботов для патрулирования территории стало очевидным. Сейчас в Северной Америке возводятся центры обработки данных совокупной мощностью 35 ГВт, они занимают десятки гектар и требуют контроля в круглосуточном режиме. В США в строй уже введены 5000 центров обработки данных, в стадии строительства находятся от 800 до 1000 штук. Для производителей роботов и операторов ЦОД подобное применение «четвероногих инспекторов» является взаимовыгодным. Клиенты Boston Dynamics, впрочем, не желают ограничиваться только функцией патрулирования. Роботы настраиваются на создание карты помещений и площадок, мониторинг процесса строительства, поиск протечек и очагов перегрева оборудования, а также акустических аномалий и непосредственно охраны объектов. Если учесть, что один робопёс Spot стоит от $175 000 до $300 000, то его применение в ЦОД может окупаться за период от полутора до двух лет, и это без учёта экономического эффекта от сбора данных, который обеспечивает робот. Конкурирующая Ghost Robotics своих робопсов предлагает Vision 60 по цене около $165 000, они также используются на подобных объектах. Затраты на одного человека в роли охранника в США достигают $150 000, поэтому робопсы при более высоких начальных расходах в дальнейшем позволяют экономить, выполняя свою работу практически непрерывно, если не считать время на перезарядку. Собственно, людей такие роботы не вытесняют полностью, они просто позволяют перейти инспекторам к удалённому наблюдению за обстановкой на объекте через транслируемые с камер робота изображения. Человек и робот в данной комбинации дополняют друг друга. На одном заряде батареи робот способен преодолеть многие километры в любых погодных условиях, в этом отношении он более неприхотлив по сравнению с человеком. Кроме того, тепловые датчики позволяют роботам определять перегрев оборудования и посылать уведомления операторам, чтобы предотвратить выход из строя дорогостоящего «железа» или пожар. В Китае создали носимого робота, который делает из человека кентавра и помогает таскать грузы
13.03.2026 [21:00],
Геннадий Детинич
Китайские инженеры из Южного университета науки и технологий (Southern University of Science and Technology) в Шэньчжэне разработали необычного «носимого» робота, который в связке с человеком делает его похожим на мифического кентавра. Это платформа для переноски тяжестей по бездорожью, в которой робот принимает часть нагрузки на свои ноги. Платформа ведома человеком, но сама подстраивает шаг под темп ходьбы и направление движения. 
Источник изображения: SUSTech В отличие от традиционных экзоскелетов, крепящихся непосредственно к ногам человека и помогающих суставам, в системе «кентавр» роботизированные ноги двигаются параллельно ногам человека, создавая с ним неразрывную связку благодаря эластичной системе крепления на его спине. Эластичное крепление с «нелинейной жёсткостью» позволяет компенсировать часть колебаний груза при движении по неровной местности. Платформа не только удерживает груз в вертикальном положении, но и создаёт движение в сторону центра тяжести человека, также экономя часть человеческих сил при переноске тяжестей. В ходе испытаний с грузом около 20 кг система показала впечатляющие результаты: энергозатраты на ходьбу — в виде экономии метаболической энергии человека — снизились на 35 %, а давление на стопы уменьшилось на 52 % по сравнению с переноской на спине рюкзака того же веса. Робот взял на себя более 52 % нагрузки, при этом сохраняя естественность человеческой походки, подстраивая шаг под движение партнёра и удерживая стабильность курса (снижая отклонения в обе стороны). В этой связке человек по-прежнему отвечает за баланс и выбор направления, а робот выполняет основную механическую работу, что делает систему интуитивной и эффективной в сложных условиях. Разработчики видят большой потенциал применения «кентавра» в областях, где требуется длительная переноска тяжёлых грузов: военная логистика, спасательные операции в чрезвычайных ситуациях, промышленные работы и транспортировка по сложному рельефу. Такому роботу-грузчику не нужны сложные «мозги», что позволяет реализовать эффективную работу уже сейчас. Figure показала, как робот на базе Helix 02 убирает гостиную с той же скоростью, что и человек
11.03.2026 [06:38],
Анжелла Марина
Калифорнийская компания Figure опубликовала видео, на котором её человекоподобный робот Figure 03 самостоятельно наводит порядок в гостиной. Робот собрал разбросанные игрушки, поправил подушки на диване и протёр поверхность мебели — без какого-либо вмешательства человека. 
Источник изображения: Figure Робот работает на основе запатентованной фирменной системы искусственного интеллекта Helix 02, использующей архитектуру vision-language-action. Как пишет Notebookcheck, система позволяет Figure 03 понимать речевые команды и взаимодействовать с объектами в реальной обстановке. Кроме того, робот способен справляться с новыми задачами без дообучения и со скоростью, сопоставимой с движениями человека. Хотя такой темп для роботов нетипичен, однако именно он позволяет работать в жилом пространстве, не создавая лишнего шума и дискомфорта для людей. Домашняя среда традиционно считается одной из самых сложных для роботов. В отличие от хорошо структурированных заводских или складских помещений, обстановка в жилых комнатах постоянно меняется: предметы разбросаны хаотично, пространство для навигации ограничено, а захват мягких объектов представляет определённую трудность в отличие от промышленных деталей. Несмотря на это, Figure 03 справился с задачей, продемонстрировав способность действовать обеими руками и одновременно перемещаться по комнате. Figure пока не делает громких заявлений о готовности робота к коммерческим продажам. Демонстрация скорее призвана показать технологический прогресс на фоне растущей конкуренции в этом секторе. Например, недавно на выставке MWC 2026 компания Honor удивила публику танцующим роботом, а XPeng пришлось разбирать свою модель, чтобы убедить зрителей, что под костюмом не прячется человек. Параллельно Samsung анонсировала планы по внедрению человекоподобных роботов в собственное производство. К 2040 году Япония намерена контролировать до 30 % мирового рынка чипов для роботов и прочих ИИ-устройств
09.03.2026 [07:06],
Алексей Разин
В восьмидесятые годы прошлого века Япония была лидером полупроводникового рынка, но в силу разного рода причин к настоящему времени растратила прежний потенциал, хотя и старается его восстановить. Новое правительство страны ставит перед ней цель занять 30 % мирового рынка чипов для «физического ИИ» к 2040 году. 
Источник изображения: Tokyo Electron Под этим термином подразумеваются полупроводниковые компоненты, используемые в роботах и системах автопилота, а также любых других устройствах, символизирующих физическое воплощение искусственного интеллекта. По сути, валовую стоимость производимых в Японии полупроводниковых компонентов за двадцать лет планируется увеличить в восемь раз до $254 млрд. Правительство Санаэ Такаити (Sanae Takaichi) собирается представить рабочую версию плана по стратегическому развитию полупроводниковой отрасли в ближайшее время, чтобы к лету утвердить его в качестве программного документа. Прогнозируется, что к 2035 году ёмкость мирового рынка полупроводниковых компонентов вырастет до $1,2 трлн, увеличившись почти в четыре раза. Японское правительство считает важным развивать сегмент полупроводникового рынка, связанный с физическим воплощением ИИ — главным образом, в сфере робототехники. Она исторически также была сильной стороной японской промышленности. К 2040 году японские чипы должны занять 30 % мирового рынка, догнав США и Китай. Вкладывая серьёзные суммы в разработку и производство чипов, Япония надеется стать их крупным поставщиком, обеспечив привлекательную стоимость продукции. Японские власти собираются субсидировать участникам рынка покупку земельных участков, а также развивать сопутствующую инженерную инфраструктуру для организации полупроводниковых производств. Законодательные реформы также будут способствовать развитию отрасли. Например, они упростят согласование доступа к водным ресурсам, которые требуются не только для производства чипов, но и для охлаждения центров обработки данных. Правительство Такаити обозначило 17 приоритетных отраслей японской экономики, искусственный интеллект, полупроводники и робототехника являются только некоторыми из них. Фармакологическая отрасль, судостроения, медицина и квантовые технологии также попали в указанный перечень. Определён 61 вид приоритетной продукции и технологий, для 27 из них японские власти разработают долгосрочные планы развития. Характерно, что отрасль видеоигр также попала в перечень стратегически важных. «Android для андроидов»: Google вернула разработчика софта для роботов Intrinsic под своё управление ради воплощённого ИИ
26.02.2026 [18:02],
Владимир Мироненко
Intrinsic, «дочка» Alphabet, специализирующаяся на разработке программного обеспечения для промышленных роботов, переходит под управление Google. Этот шаг говорит о стремлении Google расширить свой потенциал в области физического ИИ с фокусом на производственный сектор. 
Источник изображения: Igor Omilaev/unsplash.com В 2021 году Intrinsic была преобразована в независимую компанию после пяти лет деятельности в рамках Alphabet X, исследовательского подразделения компании, занимающегося амбициозными проектами. Среди других компаний, вышедших из Alphabet X, — разработчик роботакси Waymo и компания по доставке дронами Wing. Intrinsic поставила цель сделать промышленную робототехнику доступной для компаний, которые не могут позволить себе команды специализированных программистов. Программное обеспечение компании использует машинное обучение, позволяя роботам осваивать новые задачи посредством демонстрации и моделирования вместо составления инструкций для каждого движения. Среди её первых клиентов были производители, стремящиеся автоматизировать сложные сборочные операции, и логистические компании, нуждающиеся в более гибкой автоматизации складов. Созданная Intrinsic программная платформа Flowstate предназначена для разработчиков, не обладающих глубоким опытом в области разработки рабочих процессов робототехники, что соответствует миссии компании — сделать робототехнику более доступной. Однако деятельность в качестве независимой компании холдинга Alphabet имела свои ограничения. Хотя Intrinsic имела доступ к ресурсам Alphabet, она не могла в полной мере использовать облачную инфраструктуру Google и тесную интеграцию с ИИ-моделями Google, которую предлагают конкуренты, такие как Microsoft, через Azure. Перейдя под управление Google, Intrinsic получает немедленный доступ к корпоративной клиентской базе Google Cloud и cможет более глубоко интегрироваться с платформами ИИ Google. Как сообщает ресурс TechCrunch, Intrinsic будет функционировать в качестве отдельного подразделения в составе Google, при этом тесно сотрудничая с Google DeepMind и используя ИИ-модели Gemini, а также облачные сервисы Google. Консолидация отражает более широкие изменения в стратегии Alphabet, отметил ресурс Techbuzz. Когда компания провела реструктуризацию в 2015 году, создав Alphabet в качестве холдинговой компании с Google в качестве одной из нескольких дочерних компаний, целью было дать экспериментальным проектам возможность развиваться за пределами основного бизнеса Google. Однако экономическая целесообразность такой модели вызывает вопросы у инвесторов, поскольку большинство компаний холдинга Alphabet, за исключением Google, продолжают нести убытки. В прошлом году Alphabet, как сообщается, обсуждал возможность возвращения нескольких компаний под крыло Google для сокращения накладных расходов и улучшения координации. Интеграция Intrinsic, по-видимому, является первым шагом в этом направлении. Для робототехнической отрасли этот шаг говорит о том, что физический ИИ переходит из разряда исследовательских проектов в разряд серьёзных бизнес-приоритетов. Honor ворвётся на рынок человекоподобных роботов — первенца покажут уже на этой неделе
23.02.2026 [14:17],
Алексей Разин
Возможностью создания человекоподобных роботов интересуются не только автопроизводители, которые намереваются использовать их на своих автосборочных предприятиях. Производители смартфонов готовы не только разрабатывать программное обеспечение для роботов, но и выпускать готовых андроидов. 
Источник изображения: Honor Как сообщает агентство Bloomberg, китайская компания Honor Device Co., более известная в качестве «наследника» бизнеса Huawei по выпуску смартфонов под управлением операционной системы Google Android, на выставке MWC 2026 в Барселоне на этой неделе представит своего первого человекоподобного робота. Honor утверждает, что первой среди соперников начнёт предлагать подобные изделия, но следует учитывать, что та же Huawei Technologies формально уже участвует в разработке программного обеспечения для роботов. Одновременно Honor сможет продемонстрировать свои новейшие достижения в сфере разработки искусственного интеллекта. Как и многие конкуренты, компания готова вкладывать миллиарды долларов в сферу ИИ и прочие перспективные сегменты рынка, поскольку направление смартфонов в наши дни уже не демонстрирует прежних темпов роста. Как и Xiaomi, Oppo или Vivo, компания Honor разрабатывает ИИ-сервисы, которые будут интегрированы в её смартфоны и прочие электронные устройства. Honor готовится выйти на IPO, чтобы усилить приток финансовых ресурсов на данном этапе своего развития, который характеризуется высокой потребностью в дополнительных источниках капитала. Honor объявила, что проведёт отдельное мероприятие «Создатели AI-будущего» в преддверии выставки MWC 2026, которое пройдёт 1 марта в Барселоне. Вероятно, робота покажут там. Сама же компания пока лишь отметила, что на барселонском мероприятии продемонстрирует концептуальный смартфон Honor Robot Phone — продукта, вокруг которого компания намерена выстроить дальнейшее развитие своей ИИ-экосистемы. Подробности о технической реализации пока не раскрываются, но формулировки пресс-релиза позволяют говорить о попытке объединить мобильные технологии и роботизированную платформу в едином устройстве. Помимо этого, на мероприятии покажут складной флагман HONOR Magic V6, планшет HONOR MagicPad 4 и ноутбук HONOR MagicBook Pro 14. В компании подчёркивают, что новинки развивают стратегию HONOR ALPHA PLAN, анонсированную годом ранее. По всей видимости, роботизированное направление рассматривается как один из элементов более широкой трансформации бренда — от производителя смартфонов к поставщику комплексной экосистемы устройств и сервисов на базе ИИ. Разработчики человекоподобных роботов теперь стараются делать их милыми и больше похожими на людей
23.02.2026 [14:16],
Алексей Разин
Любые технические новшества неизбежно настороженно воспринимаются некоторой частью общества, разработчики человекоподобных роботов в последнее время пытаются сделать их более дружелюбными на уровне внешности, чтобы те нравились как можно большему количеству потенциальных покупателей.  Исторически основная часть роботов применялась на производстве, от них требовалась определяемая сферой применения функциональность и высокий уровень безопасности, но теперь категория сервисных роботов для домашнего и уличного применения стремительно расширяется, а потому производители стараются вызвать у окружающих симпатию к данным роботизированным помощникам. Разработчики стараются сделать роботов такими, чтобы их внешность издалека убеждала человека в его безопасности и дружелюбии. Как отмечают представители отрасли, опрошенные NBC News, в ближайшее время мы увидим, как роботы обретают более крупные головы, большие глаза и способность издавать располагающие человека звуки. Задача подобных ухищрений — вызывать у окружающих людей глубинные биологические реакции, которые способствуют благоприятному восприятию таких роботов. Компания DoorDash, которая выпускает роботов для доставки товаров, способных передвигаться по улице со скоростью до 40 км/ч, целенаправленно разрабатывала их внешность таким образом, чтобы вызывать у людей ассоциации с домашними животными. Роботы семейства Dot хотят стать членами семьи, как отмечают представители компании, они с высокой вероятностью обладают своего рода личностью. Даже округлая форма роботов-доставщиков Dot (на фото выше) была выбрана с учётом аспектов психологии человека, поскольку было доказано, что людям больше нравятся скруглённые очертания, чем чётко прорисованные углы прямоугольных функциональных объёмов. Dot оснащён крупными круглыми «глазами», которыми сигнализирует о направлении предстоящего поворота и подсказывает пешеходам удобный момент для перехода своей траектории. Звуковые сигналы оповещают о прибытии в пункт назначения или предупреждают пешеходов о приближении робота. Калифорнийская компания Interaction Labs даже наняла сценариста знаменитого анимационного фильма «История игрушек» Алека Соколова (Alec Sokolow) для участия в разработке дизайна интерактивной лампы Ongo. Устройство получило внешность робота с широко расставленными глазами и способность двигаться тем же способом, что и знаменитая мультипликационная настольная лампа Pixar. Функционально Ongo напоминает умную колонку, но она при этом ещё и может выражать эмоции своими движениями. По словам Соколова, команда разработчиков пыталась создать «нечто среднее между домашним любимцем и консьержем». 
Источник изображения: Sunday Robotics Специалисты предупреждают, что активное очеловечивание роботов в сочетании с возможностями программных ИИ-моделей будет вызывать у людей эмоциональную зависимость от соответствующих устройств. Это уже доказано стремлением некоторых пользователей роботов-пылесосов давать им уникальные имена и украшать корпус с целью индивидуализации. Создатели робота Memo (на фото выше), который способен выполнять некоторые виды работ по дому, также черпали вдохновение при разработке его внешнего вида в мультипликации — диснеевской картине «Город героев». По словам представителей компании Sunday Robotics, перед дизайнерами стояла сложная задача создания облика, который воспринимался бы достаточно серьёзно, но при этом производил бы на людей дружелюбное впечатление. Для человекоподобного робота Memo разрабатывается серия аксессуаров типа головных уборов различного цвета, которые позволят его индивидуализировать. Наличие у роботов «лиц» с глазами и человекоподобных «рук» позволяет пользователям быстрее к ним привыкнуть и проникнуться доверием, как отмечают специалисты. Робототехника является физическим воплощением искусственного интеллекта, и по мере распространения на потребительском рынке она начнёт влиять на жизнь человека всё сильнее. Именно программное обеспечение в данной сфере сейчас демонстрирует более высокий прогресс, и лишь отставание аппаратной части тормозит развитие отрасли. Огромный промышленный робот по прозвищу «Годзилла» ускорит сборку термоядерного реактора ИТЭР
12.02.2026 [16:59],
Геннадий Детинич
Один из самых амбициозных научных проектов человечества — Международный термоядерный экспериментальный реактор (ITER) — получил пополнение в виде крупнейшего в своём классе промышленного робота по прозвищу «Годзилла» (Godzilla). Установка поможет отработать техпроцессы и инструменты, которые будут применены для сборки термоядерного реактора другими роботами. Это важный шаг на пути реализации проекта, без которого его завершение будет невозможно. 
Источник изображения: ITER Роботизированный манипулятор «Годзилла» имеет высоту 4 м и способен вытягивать «руку» на длину до 5 м. Он может поднимать до 2,5 т груза. Однако робот не предназначен для непосредственной работы внутри вакуумной камеры токамака, некоторые компоненты которой весят свыше 4 тонн. Он будет служить тестовой платформой для отработки технологий дистанционной сборки реактора. Основная задача «Годзиллы» — тестирование и проверка интеграции инструментов, которые будут использоваться специализированными роботами при монтаже около 20 000 компонентов внутри вакуумного сосуда. Робот позволит оценить механизм крепления для быстрой замены более чем 30 специализированных инструментов для захвата, закручивания болтов, сварки, резки и инспекции. Кроме того, на роботе будут отработаны системы машинного зрения для точного позиционирования, а также датчики силы и крутящего момента, обеспечивающие автоматике «осязание» и предотвращающие повреждение деталей в тесном пространстве. Начиная с марта 2026 года тестирование приёмов и инструментов по сборке реактора будет вестись на макетах, имитирующих реальную среду внутри токамака. Ключевой фишкой, отрабатываемой с помощью робота, считается концепция ускоренного монтажа Rolling Waves (по-русски — «бегущие волны») — это параллельная, а не последовательная сборка узлов внутри реактора, которая обещает ускорить монтаж. Специализированные команды и роботы будут двигаться по слоям: пока одна группа устанавливает компоненты одного уровня, другая уже работает над следующим. Такой подход существенно сократит сроки сборки и минимизирует риски. Доказавшие свою успешность на примере «Годзиллы» монтажные технологии будут внедрены в более крупные системы сборки и дистанционного обслуживания реактора: в сборщик внутренней оболочки Blanket Assembly Transporter массой около 39 тонн для монтажа 440 модулей покрытия, а также в башенный кран для работы внутри камеры (In-Vessel Tower Crane) для манипуляций с дивертором. Эти системы будут вводиться по мере необходимости и не останутся внутри во время плазменных экспериментов, но без них монтаж внутренних компонентов реактора невозможен. Каждый их элемент и монтажная операция будут отработаны на «Годзилле» — за исключением подъёма сверхтяжёлых грузов. Тот же Blanket Assembly Transporter будет поднимать плиты оболочки массой свыше 4,4 т, что не под силу «Годзилле». В общем, «Годзилла» сыграет вспомогательную, но критически важную роль в подготовке к сборке самого сложного элемента ITER — вакуумной камеры. Успешная проверка инструментов и процессов позволит перейти к этапу полноценной сборки, приближая проект к цели — начать операции с дейтерий-тритиевой плазмой к 2039 году. Xiaomi создала «интеллект» для роботов: ИИ-модель с 4,7 млрд параметров объединяет зрение, язык и действия
12.02.2026 [12:02],
Павел Котов
Китайская Xiaomi, известная в первую очередь как производитель мобильных устройств, оборудования умного дома, а теперь и электромобилей, заявила о себе в новом качестве. Она решила занять место в исследованиях в области робототехники. 
Источник изображений: xiaomi-robotics-0.github.io Компания представила Xiaomi-Robotics-0 — модель искусственного интеллекта с открытым исходным кодом, сочетающую в себе визуальный, языковой компоненты и компонент действия; у неё 4,7 млрд параметров. В модели объединяются распознавание визуальных образов, понимание языка и способность производить действия в реальном времени, что, как отметили в Xiaomi, составляет ядро «физического интеллекта». Она уже установила несколько рекордов как в симуляциях, так и в реальных испытаниях. ИИ-модели для роботов обычно действуют в замкнутом цикле: восприятие, принятие решения и выполнение операции. Робот видит объекты окружающего мира, понимает, что от него требуется, составляет план действий и реализует его — Xiaomi-Robotics-0 создавалась, чтобы сбалансировать широкое понимание с точным управлением моторикой. Для этого здесь использована архитектура «смеси трансформеров» (Mixture-of-Transformers — MoT), которая помогает распределять обязанности между двумя основными компонентами. Первый компонент — визуально-языковая модель (VLM), выполняющая функцию «мозга». Она обучена интерпретировать отдаваемые человеком команды, в том числе расплывчатые, такие как «пожалуйста, сложи полотенце», а также понимать пространственные отношения на основе визуальных сигналов высокого разрешения. Задачи этой части — обнаружение объектов, ответы на вопросы в визуальной области и логические рассуждения. Второй компонент в Xiaomi называют экспертом по действиям (Action Expert). Эта часть модели имеет архитектуру диффузионного трансформера (Diffusion Transformer — DiT). Она не предполагает выполнения одного действия за раз, а генерирует последовательность действий, используя методы сопоставления потоков, что обеспечивает точность и плавность движения. 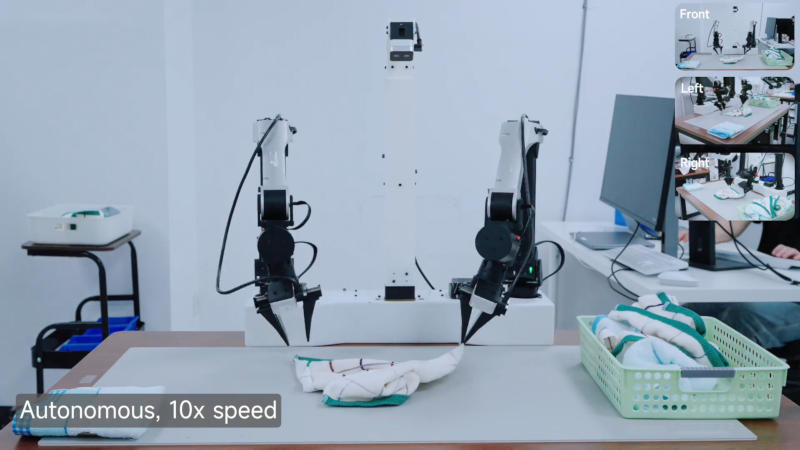 Слабой стороной VLM является то, что при обучении выполнению физических операций они, как правило, теряют часть заложенных ранее способностей к пониманию. Инженерам Xiaomi удалось избежать этой проблемы, обучая модель одновременно на мультимодальных данных и данных о действиях. В теории это означает, что такая система может одновременно рассуждать об объектах окружающего мира и учиться в нём передвигаться. Процесс обучения включает несколько этапов. Сначала механизм «предложения действий» заставляет VLM предсказывать возможные распределения действий при интерпретации изображений — это помогает согласовывать внутреннее представление модели о том, что она видит, с тем, как выполняются операции. После этого работа компонента VLM приостанавливается, и DiT проходит отдельное обучение для генерации точных последовательностей из шума на основе ключевых признаков, а не дискретных языковых токенов. Xiaomi удалось решить проблему задержки вывода — паузы между выдаваемыми моделью прогнозами и физическим движением робота. Для этого реализовали асинхронный вывод, разделив вычисления модели и действия робота: движения остаются непрерывными, даже если модели требуется дополнительное время на обдумывание. Для повышения стабильности используется техника Clean Action Prefix, предполагающая возврат в модель предсказанного ранее действия, что обеспечивает плавное движение без рывков во времени. Маска внимания направляет модель на актуальный визуальный ряд, понижая приоритет прошлых состояний, в результате чего робот оказывается отзывчивым к внезапным изменениям окружающей среды. В симуляциях LIBERO, CALVIN и SimplerEnv модель Xiaomi-Robotics-0 превзошла около 30 других, сообщил разработчик. В реальных экспериментах она проверялась на роботе с двумя манипуляторами: в задачах с последовательностями действий, таких как складывание полотенец и разборка блоков конструктора, робот демонстрировал стабильную координацию рук и глаз, одинаково эффективно манипулируя как жёсткими, так и мягкими объектами. Модели действительно удалось сохранить сильные визуальные и языковые возможности, особенно в задачах, связанных с физическим взаимодействием. Гендир Boston Dynamics, превративший разработку роботов в бизнес, уходит в отставку
11.02.2026 [10:26],
Алексей Разин
На определённом этапе американский робототехнический стартап Boston Dynamics пользовался покровительством SoftBank, а в 2021 году перешёл под контроль южнокорейского автопроизводителя Hyundai Motor Group. Генеральный директор компании на этой неделе объявил, что покинет её в текущем месяце после шести лет работы в должности. 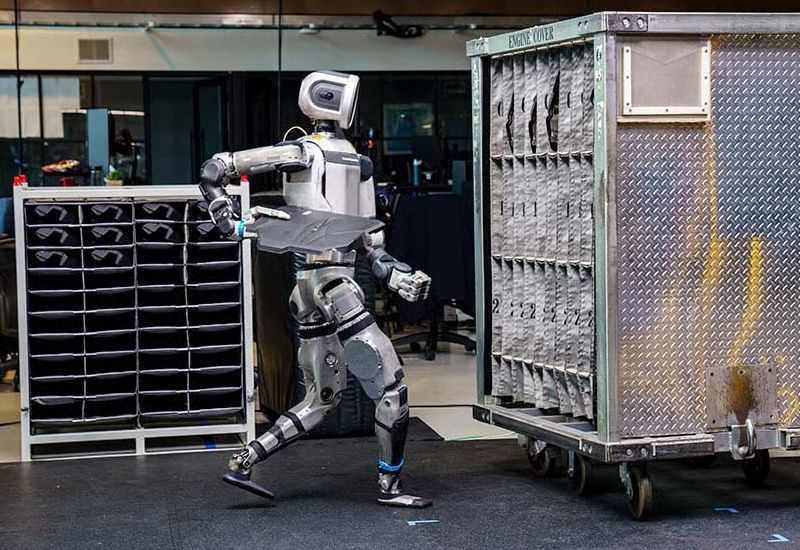
Источник изображения: Boston Dynamics На период руководства Роберта Плейтера (Robert Playter) пришёлся весьма насыщенный этап развития бизнеса Boston Dynamics. В прошлом месяце стало известно, что созданный компанией человекоподобный робот Atlas начнёт применяться на автосборочных предприятиях материнского концерна Hyundai с 2028 года. Плейтер является ветераном Boston Dynamics, поскольку он работал в компании на протяжении более чем тридцати лет, и только с 2020 года возглавил её после ухода предшественника. Временно исполнять обязанности генерального директора после ухода Плейтера в конце февраля начнёт финансовый директор компании Аманда Макмастер (Amanda McMaster). Стоявший у истоков стартапа Плейтер с теплотой вспоминает годы карьеры, связанные с Boston Dynamics: «То, чем она стала, превосходит все мои ожидания тех далёких времён, когда мы начинали в подвальной лаборатории MIT Media Lab». Наиболее успешными разработками Boston Dynamics Плейтер считает роботов Spot, Stretch и Atlas. По словам Николаса Ноэля (Nikolas Noel), вице-президента Boston Dynamics по маркетингу и коммуникациям, именно Плейтер превратил компанию из небольшой исследовательской лаборатории в успешный бизнес, который по праву может считать себя мировым лидером в области мобильной робототехники. Сотрудникам Boston Dynamics будет его не хватать, но Плейтер заслужил право на отдых, по словам представителя компании. Alibaba выпустила открытую ИИ-модель RynnBrain для роботов
10.02.2026 [16:55],
Павел Котов
Alibaba представила модель искусственного интеллекта, предназначенную для работы в роботизированных системах — она позволяет им выполнять задачи в реальном мире. Китайский технологический гигант стремится установить лидерство в нескольких областях отрасли ИИ. 
Источник изображения: alibaba-damo-academy.github.io Входящая в китайскую компанию академия DAMO представила основополагающую модель с открытым исходным кодом — она обеспечивает взаимодействие роботов с окружающей средой. Модель понимает отношения пространства со временем и может определять шаги для выполнения задач. Проект получил название RynnBrain; в его описании указано, что модель умеет составлять карты объектов, прогнозировать траектории, ориентироваться в тесных пространствах, например, на кухне или сборочной линии на заводе. С новой моделью Alibaba бросает вызов таким технологическим гигантам как Google и Nvidia. У первой есть модель Gemini Robotics-ER 1.5, у второй — Nvidia Cosmos-Reason2. RynnBrain обучена на большой языковой модели Qwen3-VL и доступна бесплатно на платформах Face и GitHub в нескольких версиях — от базовой с 2 млрд параметров до передовой в конфигурации MoE (Mixture-of-Experts). Она создана для работы в области, где за первенство сражаются Китай и США. Робототехника выступает одним из приоритетов для Пекина, а ключевым направлением считаются человекоподобные роботы, в которых видят потенциал по доминированию в области физического ИИ и преобразованию секторов от производства до гостиничного бизнеса. Китайские компании выпускают преимущественно модели ИИ с открытым кодом, тогда как американские игроки предпочитают удерживать передовые технологии за закрытыми дверями. Стратегия открытого исходного кода по направлению физического ИИ до настоящего момента преимущественно ограничивалась проектами академических учреждений. |
|
✴ Входит в перечень общественных объединений и религиозных организаций, в отношении которых судом принято вступившее в законную силу решение о ликвидации или запрете деятельности по основаниям, предусмотренным Федеральным законом от 25.07.2002 № 114-ФЗ «О противодействии экстремистской деятельности»; |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.







 MWC 2018
MWC 2018 2018
2018 Computex
Computex