|
Опрос
|
реклама
Быстрый переход
Гуманоидный робот Xiaomi поработал на сборке автомобилей — как надо закручено 9 гаек из 10
02.03.2026 [19:14],
Сергей Сурабекянц
Человекоподобный робот Xiaomi в полностью автономном режиме успешно отработал в течение 3 часов подряд на станции сборки самонарезающих гаек на заводе по производству электромобилей компании. Согласно результатам испытаний, робот совершил 90,2 % успешных операций, уложившись в самые жёсткие требования цикла производственной линии. 
Источник изображения: Xiaomi Компания Xiaomi сделала важный шаг в развитии воплощённого интеллекта, официально внедрив своего человекоподобного робота на реальный автомобильный завод для участия в сложных работах по сборке компонентов. Он успешно проработал 3 часа подряд в автономном режиме на станции установки самонарезающих гаек в цехе литья под давлением. Задача робота состояла в точном захвате гаек из автоматического подающего устройства и установке их на позиционирующие приспособления. Процесс осложнялся необходимостью координации действий робота с работой конвейера. По словам Xiaomi, наибольшая сложность заключалась в точности выравнивания и надёжности зацепления самонарезающих гаек. Шлицевая структура внутри гаек, нефиксированное положение захвата и помехи от магнитных сил значительно увеличивают сложность сборки. 
Источник изображения: Futurama Для решения этих проблем Xiaomi применила комплексный подход к управлению на основе данных. Это решение использует разработанную внутри компании большую модель VLA (Vision-Language-Action) с 4,7 миллиардами параметров, Xiaomi-Robotics-0, в сочетании с технологией обучения с подкреплением. Эта объединённая система обучения снижает зависимость от реальных данных телеуправления. Она позволяет роботу быстро адаптироваться к различным условиям работы и непрерывно учиться на основе взаимодействия с физической средой. Кроме того, Xiaomi интегрировала мультимодальную информацию, включая зрение, тактильную обратную связь и проприоцепцию (мышечное чувство) суставов. Это снижает вероятность ошибочной оценки состояний в сложных сценариях, повышая операционную стабильность и надёжность. Для управления движением всего тела использовалась гибридная архитектура, интегрирующая оптимизационное управление с обучением с подкреплением. Контроллер прошёл обучение на сотнях миллионов смоделированных случайных возмущений в виртуальной среде. На каждую итерацию контроллер тратил менее 1 миллисекунды, обеспечивая отклик системы в реальном времени. Это позволило роботу сохранять равновесие в экстремальных условиях и обеспечило перенос навыков на реальных роботов без предварительного обучения. 
Источник изображения: unsplash.com Xiaomi заявила, что станция для сборки самонарезающих гаек является первым шагом в масштабировании применения человекоподобных роботов в автомобильной промышленности. В настоящее время компания проводит развёртывание и проверку роботов на нескольких других типичных рабочих станциях. К ним относятся такие задачи, как захват контейнеров и установка передней эмблемы. Xiaomi сосредоточена на преодолении основного узкого места «времени производственного цикла и коэффициента выхода годной продукции» для обеспечения более широкого промышленного внедрения. Глава Xiaomi Лэй Цзюнь (Lei Jun) ожидает появления большого количества человекоподобных роботов на заводах Xiaomi в течение следующих пяти лет. Достижения Xiaomi в области робототехники происходят на фоне массированных инвестиций со стороны технологических компаний в воплощённый интеллект. Конкуренты активно продвигают массовое производство и применение роботов. Генеральный директор Tesla Илон Маск (Elon Musk) ранее заявлял, что к концу 2026 года робот Optimus сможет выполнять сложные комплексные задачи. Tesla планирует запустить серийную версию своего человекоподобного робота третьего поколения в первом квартале этого года. 
Источник изображения: Tesla Китайский производитель электромобилей Xpeng также ускоряет внедрение робототехники. В планах компании начать уже в текущем квартале строительство первой в отрасли базы массового производства человекоподобных роботов в Гуанчжоу и запустить массовое производство к концу 2026 года. 
Источник изображения: Xpeng ИИ-пузырь получил соседа: Пекин предупредил о перегреве рынка человекоподобных роботов
27.11.2025 [16:48],
Павел Котов
Национальная комиссия по развитию и реформам Китая предупредила, что в отрасли человекоподобных роботов возможно образование экономического пузыря. Власти страны редко выражают обеспокоенность по поводу бурно развивающегося технологического направления. 
Источник изображения: ubtrobot.com «Передовые отрасли давно сталкиваются с проблемой баланса между темпами роста и угрозой формирования пузырей — теперь этот вопрос встал перед направлением человекоподобных роботов», — заявила представитель ведомства Ли Чао (Li Chao). В стране отметила она, работают более 150 производителей гуманоидных машин, и их число продолжает расти; необходимо предотвратить вывод на рынок «очень похожих» моделей, и следует создавать условия для исследований и разработки. В Пекине начали беспокоиться по поводу чрезмерного притока инвестиций в сектор, который обещает стать одним из крупнейших катализаторов развития экономики. Это одна из шести отраслей, на которую власти призвали обращать внимание в новой пятилетке. Аналитики предсказывают, что уже в следующем году обозначится «экспоненциальный» рост производства человекоподобных роботов; UBTech обеспечила себя заказами более чем на $100 млн, но широкого внедрения этих машин на производстве пока не случилось. В этом году ориентированный на китайские компании индекс Solactive China Humanoid Robotics показал рост на 26 %. Власти ускорят работу по созданию благоприятной среды: возникнут механизмы вывода продукции на рынок, а также выхода с него, что поможет сформировать честную конкуренцию, заявила госпожа Ли. Особое внимание будет уделяться направлениям исследования и разработки основных технологий, а также инфраструктуре для обучения и испытания роботов. Власти также намерены способствовать консолидации и совместному использованию технологических решений и ресурсов, что поможет ускорить развёртывание человекоподобных роботов в реальной жизни. Китайская Deep Robotics представила первого «непромокаемого» гуманоидного робота
10.10.2025 [11:44],
Павел Котов
Китайская Deep Robotics представила DR02 — этот человекоподобный робот предназначен для непрерывного выполнения задач в непростых промышленных и уличных условиях. Его конструкцию отличает защита по стандарту IP66 от воды и пыли, а также способность работать в широком диапазоне температур. 
Источник изображения: Deep Robotics Защита класса IP66 означает, что Deep Robotics DR02 защищён от воздействия струй воды и полностью пыленепроницаем — он может работать в пыли, в условиях высокой влажности и под дождём. Диапазон рабочих температур от -20 °C до +50 °C позволяет использовать робота в ситуациях, где сложное электронное оборудование обычно не применяется: на объектах под открытым небом, в холодильных складах и в цехах с высокой температурой. Рост DR02 составляет 175 см, что позволяет ему маневрировать в существующих рабочих пространствах. Грузоподъёмность каждой из его рук составляет 10 кг, и он способен переносить грузы массой до 20 кг. Робот уверенно передвигается, скорость его ходьбы составляет 1,5 м/с, он может преодолевать лестницы и склоны крутизной до 20°. На борту Deep Robotics DR02 имеется набор сенсоров для обработки сигналов внешнего мира; встроенная вычислительная система имеет производительность 275 TOPS.  Учитывая, что задачи по техобслуживанию в промышленных условиях приходится решать с учётом некоторых ограничений, Deep Robotics предусмотрела возможность быстрой замены рук и ног DR02 — это упрощает ремонт и сокращает время простоя. Чтобы делать выводы о возможности применения робота на практике, потребуется посмотреть, как он проявит себя в реальных пилотных программах и насколько быстро сможет внедряться в действующие рабочие процессы. Deep Robotics пока не раскрыла многих важных аспектов DR02: неизвестно, насколько он функционален в автономном режиме, сколько он сможет проработать на одном заряде аккумулятора, не оглашается даже его цена. Впрочем, защищённая конструкция — это важное качество, которого пока не хватает многим человекоподобным роботам, и которое до сих пор остаётся препятствием к их широкому развёртыванию. Китайская Ant Group показала гуманоидного робота с ИИ — он умеет готовить и давать медицинские советы
11.09.2025 [19:01],
Сергей Сурабекянц
Компания Ant Group, спонсируемая основателем Alibaba Group Джеком Ма (Jack Ma), представила своего первого гуманоидного робота R1. По словам создателей, робот может выполнять функции гида, сортировать лекарства в аптеках, проводить медицинские консультации и выполнять базовые кухонные задачи. Хотя Ant Group больше известна как финтех-компания, стоящая за системой цифровых платежей Alipay, сейчас она активно инвестирует в ИИ, чтобы обеспечить себе конкурентоспособность в новую эпоху. 
Источник изображения: Ant Group Ant Group позиционирует себя прежде всего, как разработчика «мозга» для роботов. Компания рассматривает гуманоидных роботов как стратегический шлюз для популяризации чат-ботов и помощников на основе ИИ. По словам главы Ant Чжу Сина (Zhu Xing), компания делает ставку на то, что крупные модели ИИ, которые пока находятся на ранних стадиях трансформации общества, вскоре изменят взаимодействие человека с машинами. В настоящее время Ant разрабатывает собственную большую языковую модель BaiLing и экспериментирует с её обучением. «Если гуманоидные роботы будут использоваться дома, они не просто помогут с повседневными задачами, но и будут действовать как суперумные мозги, используя облачный ИИ для решения ещё большего количества задач, — уверен Чжу. — Для Ant это имеет смысл, поскольку наша цель — упростить жизнь людей, будь то платежи, финансы или цифровые государственные услуги». По словам осведомлённых источников, гуманоидный робот R1 построен с использованием компонентов от различных китайских поставщиков. По слухам, в настоящее время Ant Group ведёт переговоры с Unitree и Orbbec. Аналитики полагают, что производство роботов будет достаточно просто передать на аутсорсинг, а коммерческий успех будет определяться в первую очередь использованной моделью ИИ. Ant утверждает, что её модель ИИ хорошо справляется со сквозным планированием сложных задач, а система пространственного восприятия умеет распознавать взаимосвязи между объектами. Благодаря этому R1 способен выполнять такие задачи, как приготовление и подача еды. Теоретически он также может изучать новые рецепты и использовать различные кухонные приспособления и технику. Независимые оценки заявлений Ant пока недоступны. Отчасти из соображений безопасности компания всё ещё тестирует своего робота в общественных центрах и ресторанах, и не продаёт его розничным покупателям. Цена R1 также пока не известна. В долгосрочной перспективе компания планирует разработать роботов-компаньонов и помощников, призванных улучшить повседневную жизнь, от оказания медицинской помощи до выполнения домашних дел. Представив своего гуманоидного робота R1, Ant Group вступает в жёсткую конкуренцию в сфере, где столкнулись интересы таких компаний, как Tesla или Unitree Robotics. Китай, где процент роботов на производстве уже сейчас выше, чем в США и Японии, готовит гуманоидов к выполнению всё более сложных задач. Робот Xueba 01 поступил в аспирантуру по драматургии — если провалит экзамены, он «самообнулится»
01.08.2025 [20:46],
Геннадий Детинич
Антропоморфный робот по имени «Сюэба» (Xueba) впервые в Китае поступил в аспирантуру по специальности «Драматургия театра и кино» (drama and film studies). Его зачислила Шанхайская театральная академия, планируя по окончании курса выдать диплом кандидата наук в области искусств. Имя «Сюэба» в китайском языке означает «круглый отличник» или «зубрила». При этом робот остроумен и находчив, чем уже завоевал симпатии китайского сегмента интернета. 
Источник изображений: STA Робот Xueba 01 был разработан Шанхайским университетом науки и техники в партнёрстве с компанией DroidUp Robotics. Более ранняя версия робота заняла третье место в первом в мире полумарафоне для роботов-гуманоидов, который состоялся в апреле этого года в Пекине. По данным шанхайского издания Shangguan News, рост Xueba 01 составляет 1,75 м, вес — около 30 кг, и он может физически взаимодействовать с людьми. По словам его создателей, антропоморфный гуманоид выглядит как «красивый взрослый мужчина». В определённой степени он воспроизводит человеческую мимику, поскольку его лицо покрыто эластичной силиконовой кожей и оснащено подобием мышц. Язык общения — китайский (прямая речь).  Для получения учёной степени робот должен пройти стандартный четырёхлетний курс в области драмы и кино, специализируясь на традиционной китайской опере. Не уточняется, будет ли обучение проходить в ускоренном формате. Впрочем, в этом его могут ограничить преподаватели — они, в отличие от робота, не «железные» и не смогут круглосуточно загружать знания в его память. Стоимость обучения не разглашается. Программа «робот-кандидат наук» является частью исследовательской инициативы Шанхайской театральной академии по интеграции искусства и технологий. На торжественной церемонии «Сюэба» получил виртуальный студенческий билет, а его наставником стал известный шанхайский художник и профессор Ян Цинцин (Yang Qingqing). В программе обучения робота — сценическое мастерство, написание сценариев, оформление сцены, а также актёрское искусство.  Робот будет посещать занятия, репетировать оперы с другими аспирантами и завершит обучение работой над диссертацией. «Когда робот общался со своими одногруппниками, это была не встреча холодной машины с людьми, а эстетический обмен между представителями разных видов», — сказал куратор робота. Сам робот называет себя «художником с искусственным интеллектом», использующим передовые технологии для изучения традиционной оперы. Робот надеется завести друзей, обсудить сценарии, помочь отточить танцевальные движения и даже включать успокаивающий белый шум, если его одногруппники почувствуют себя утомлёнными.  Профессор Ян отметил, что Xueba 01 после окончания курса может стать режиссёром традиционной оперы с искусственным интеллектом в музее или театре, а также открыть собственную роботизированную художественную студию. Если же робот провалит экзамены, он «обнулит» себя и станет экспонатом музея искусств — чтобы хотя бы так оставить след в истории. Китайская Fourier показала «самого милого» гуманоидного робота для дома и школы
31.07.2025 [18:44],
Сергей Сурабекянц
Китайская робототехническая компания Fourier Robotics, ранее создавшая модели GR-1 и GR-2, готовится 6 августа представить своего нового гуманоидного робота GR-3. В опубликованном проморолике демонстрируется компактный робот с дружелюбным дизайном, которого разработчики называют «самым милым гуманоидным роботом на сегодняшний день». 
Источник изображений: Fourier Robotics GR-3 — это логичное развитие предыдущих моделей компании. GR-1 был выпущен в 2023 году и стал первым гуманоидным роботом, ориентированным на массовый рынок. Робот имел 44 степени свободы и мог передвигаться со скоростью до 5 км/ч. Он переносил груз весом до 3 кг, обладал развитой системой восприятия с помощью шести камер, системой эмоционального взаимодействия на основе большой языковой модели и модульными интеллектуальными приводами с крутящим моментом около 230 Н·м. GR-2 был представлен в 2024 году и поднял планку на новый уровень благодаря более мощному «телосложению» (рост — 175 см, вес — 63 кг), 53 степеням свободы, манипуляторам с тактильными датчиками и приводам с крутящим моментом около 380 Н·м. По предварительным данным, рост GR-3 составит около 134 см. Он заметно меньше своих предшественников и отличается от своих старших собратьев «более нежной, почти мягкой эстетикой». Робот предназначен для использования в домашних условиях, школах, больницах и общественных пространствах. Он оснащён интегрированной большой языковой моделью, обеспечивающей естественное речевое взаимодействие с пользователями. GR-3 позиционируется как робот-компаньон или бот-опекун (care-bot), предназначенный для дружелюбного взаимодействия с человеком в личной или учебной среде. GR-3, адаптированный для домашнего использования, должен обеспечить комфортное взаимодействие с пользователем благодаря своему «милому» дизайну и доступному интерфейсу. Его специализированные приводы и датчики оптимизированы для выполнения социальных и несложных бытовых задач. Ожидается, что он также получит доступный программный стек с готовым API для разработчиков и интеграцию с большими языковыми моделями и системами машинного зрения.  «Эта более мягкая эстетика — приятное изменение по сравнению с обычным дизайном гуманоидных роботов. Глаза — очень нужный штрих», — считает один из пользователей социальных сетей. «Он такой выразительный и притягивает взгляд. Не терпится увидеть, как он будет выглядеть. Надеюсь, цена будет разумной. Определенно представляю себя владельцем одного из них», — гласит другой комментарий.  Официальная презентация GR-3 запланирована на начало августа. В случае успеха этот малогабаритный социально ориентированный гуманоидный робот может открыть новые рынки в сфере обучения, общения и выполнения простых бытовых задач, особенно при условии доступной цены. В Пекине прошёл первый в мире футбольный турнир между гуманоидными роботами
29.06.2025 [23:03],
Анжелла Марина
В столице Китая состоялся уникальный футбольный турнир, в котором приняли участие роботы-гуманоиды. Без какого-либо внешнего вмешательства, управляемые только искусственным интеллектом роботы ловко маневрировали, отбирали мяч и наносили удары по воротам. В финале участвовали четыре китайские команды, прошедшие отборочный тур. 
Источник изображений: nypost.com Как отметила организатор мероприятия Доу Цзин (Dou Jing), этот турнир стал не только первой в Китае игрой роботов в формате 3 х 3, но и тестовым соревнованием перед предстоящими Всемирными играми гуманоидных роботов в 2025 году. Матч состоял из двух таймов по 10 минут с пятиминутным перерывом, а роботы, несмотря на некоторую неуклюжесть в движениях, продемонстрировали высокий уровень автономности.  Каждый робот оснащён камерами и датчиками, позволяющими распознавать мяч и ориентироваться в пространстве. Вся система визуального восприятия работает на основе оптических камер, а чтобы избежать ошибок и чётко идентифицировать белый цвет мяча, разработчики исключили белый цвет в экипировке роботов, судей и персонала.  Обучение роботов проводилось на основе алгоритмов машинного обучения, при котором система совершенствуется методом проб и ошибок, позволяя игрокам в дальнейшем самостоятельно принимать решения. Как пояснил основатель компании Booster Robotics Чэн Хао (Cheng Hao), точность распознавания мяча на расстоянии до 20 метров превышает 90 %. Робот анализирует положение мяча, ворот и партнёров, после чего выбирает оптимальное действие, например передачу или удар по воротам.  Как отмечает New York Post, соревнование в Пекине стало лишь своеобразным дебютом к более масштабному событию. С 15 по 17 августа 2025 года в рамках Всемирной конференции по робототехнике впервые пройдут Всемирные игры гуманоидных роботов. Гуманоидные роботы Foxconn приступят к сборке ИИ-серверов Nvidia уже в следующем году
20.06.2025 [19:55],
Сергей Сурабекянц
Тайваньская технологическая компания Foxconn и американский производитель чипов ИИ Nvidia ведут переговоры о развёртывании человекоподобных роботов на новом заводе Foxconn в Хьюстоне, где будут производиться ИИ-серверы Nvidia. В случае успеха это предприятие станет для обеих компаний первым прорывным опытом столь массового использования гуманоидных роботов на производстве. Ожидается, что развёртывание будет завершено в ближайшие месяцы. 
Источник изображения: linkedin.com Foxconn разрабатывает собственных человекоподобных роботов совместно с Nvidia, а также проводит испытания роботов, произведённых китайской компанией UBTech. Пока неясно, сколько человекоподобных роботов будет использовано на заводе в Хьюстоне и какого они будут типа. По сообщениям из осведомлённых источников, в настоящее время Foxconn обучает роботов подбирать и размещать предметы, вставлять кабели и выполнять сборочные операции. Завод Foxconn в Хьюстоне идеально подходит для развёртывания гуманоидных роботов, поскольку это совершенно новое предприятие, где ещё на этапе проектирования были предусмотрены все особенности, связанные с их массовым использованием. Первой продукцией нового завода станут серверы GB300 от Nvidia, их сборка должна стартовать в начале следующего года. Кроме завода в Хьюстоне, Nvidia строит в партнёрстве с Wistron подобное предприятие в Далласе. Ожидается, что оба завода выйдут на запланированные объёмы производства в течение 12–15 месяцев. 
Источник изображения: techovedas.com По слухам, Foxconn планирует продемонстрировать на ежегодном технологическом мероприятии в ноябре две версии самостоятельно разработанных компанией роботов. Первый вариант представляет из себя гуманоидного робота, а второй использует для передвижения колёсную автономную роботизированную базу, что делает его дешевле ходячего собрата. Для Nvidia использование гуманоидных роботов в производстве своих серверов ИИ представляет естественный шаг, поскольку компания разработала собственную платформу, которую поставляет изготовителям роботов. По мнению главы Nvidia Дженсена Хуанга (Jensen Huang), повсеместное внедрение гуманоидных роботов на производственных предприятиях произойдёт в течение ближайших пяти лет. 
Источник изображения: Futurama «Яндекс» собрался выпускать человекоподобных роботов, но потом
29.04.2025 [12:00],
Павел Котов
«Яндекс» начнёт разрабатывать ПО для человекоподобных роботов, и в перспективе компания не исключает запуск их серийного производства, пишет РБК со ссылкой на представителя компании. Гуманоиды хороши тем, что для их работы не требуется специальная инфраструктура, но и в России, и за рубежом это направление только начинает активно развиваться. 
Источник изображения: Cash Macanaya / unsplash.com Проект будет финансироваться из средств фонда Yet Another Tech Fund, который недавно был создан внутри компании — инициатива направлена на поддержку проектов сотрудников «Яндекса», способных «продвинуть вперёд науку или технологии». В этом году российский интернет-гигант может потратить на эти цели 330 млн руб. Посвящённый человекоподобным роботам проект войдёт в направление автономного транспорта подразделения Yandex B2B Tech. На начальном этапе гуманоиды обретут базовую подвижность и способность адаптироваться к условиям среды: ходить по ровным поверхностям, подниматься по лестницам, открывать двери, преодолевать турникеты, а также поднимать и переносить грузы. Далее «Яндекс» рассчитывает взять на себя полный цикл разработки человекоподобных роботов: к написанию ПО добавятся их проектирование и производство. Сосредоточившись на собственной платформе, компания сможет оптимизировать её под конкретные задачи и ускорить вывод продуктов на рынок. Производственных партнёров в компании не назвали. Важнейшим преимуществом гуманоидов является отсутствие потребности в специальной инфраструктуре: человекоподобная машина должна работать в тех же условиях, что и человек. На практике такие машины смогут обеспечивать логистику внутри зданий — доставлять посылки, обходить промышленные объекты, помогать людям в быту и на производстве. «В данный момент мы находимся на этапе разработки операционной системы для управления базовыми элементами робота-гуманоида. Основа команды сформирована, мы активно нанимаем нужных специалистов. Следующий этап – тестирование в полях и реальных условиях, а в будущем – собственное производство роботов», — рассказали в «Яндексе». 
Источник изображения: julien Tromeur / unsplash.com По итогам 2024 года объём мирового рынка составил $3,28 млрд, подсчитали аналитики Fortune Business Insights, а к 2032 году он достигнет $66 млрд. Пока человекоподобные роботы находятся на стадии разработки, но в последние годы они уже начали применяться на практике: в исследовательских проектах, в уходе за людьми, в образовании и развлечениях. Американская Apptronik в 2023 году построила складского робота Apollo с ростом 173 см, массой 72,5 кг и грузоподъёмностью до 25 кг. В апреле прошлого года Boston Dynamics (принадлежит Hyundai) представила новое поколение гуманоида Atlas, в котором на смену гидравлике пришла полностью электрическая платформа. Tesla активно работает над человекоподобным Optimus; данным направлением заинтересовалась и Meta✴✴. В России робототехникой занимаются, в частности, компании «Промобот» и AlfaRobotics. Готовые к практическому применению роботы появятся через два–три года, считают опрошенные РБК эксперты. В России стимулами для развития робототехники могут стать поддержка как разработчиков, так и покупателей оборудования. Созданием ПО для роботов уже занимаются как крупные промышленные игроки, в том числе «Андроидная техника», «Калашников», «Ростех», так и интеграторы, стартапы, научные центры, а также вузы. Крупнейшими проблемами отечественной робототехники эксперты называют низкую стандартизацию, более скромное по сравнению с США, Китаем и ЕС финансирование проектов и дефицит квалифицированных кадров. При этом значение робототехники сейчас возрастает — инвесторы всё чаще обращают на неё внимание. Российским разработчикам предстоит преодолеть множество препятствий: в первую очередь — высокие цены и низкую производительность; также необходимо решить вопросы безопасности. Человекоподобные роботы Unitree научились лихо отплясывать китайские народные танцы вместе с людьми
03.02.2025 [18:26],
Сергей Сурабекянц
На прошлой неделе китайская робототехническая компания Unitree продемонстрировала, как 16 её гуманоидных роботов H1 лихо отплясывают вместе с танцорами-людьми на гала-мероприятии в честь Китайского Нового года. Роботы не только слаженно двигались в едином ритме с людьми, но и безупречно выполняли сложнейшие акробатические трюки. В частности, им отлично удались элементы манипулирования платком из китайского народного танца «Янгэ». 
Источник изображений: Unitree Видео с танцующими роботами Unitree H1 включает кадры, снятые на репетиции и на сцене. По утверждению компании, это было «первое в истории масштабное, полностью управляемое ИИ и полностью автоматизированное кластерное гуманоидное представление роботов». Танец транслировался по китайскому телевидению в рамках ежегодной новогодней телепрограммы, которая признана Книгой рекордов Гиннесса самой популярной в мире — в 2012 году её посмотрели почти полмиллиарда человек, а на сегодняшний день это число удвоилось. Представитель Unitree сообщил, что танцевальная программа была заранее подготовленным представлением с использованием данных реальных танцоров. Управление движением всего тела с помощью ИИ позволило H1 танцевать синхронно друг с другом, а сканирование окружающей среды с помощью лидаров обеспечило обратную связь для внесения корректив в ответ на незапланированные события вокруг них. Рост робота H1 составляет 175 см. Эта модель оснащена лидарами и камерой глубины, сканирующими пространство на 360 градусов. H1 умеет делать сальто назад, его высокая манёвренность объясняется обширным набором данных захвата движения. Unitree опубликовала сопровождающее видео, которое демонстрирует ряд очень сложных движений. H1 оценён в $90 000. Выступление роботов H1 — большой шаг вперёд по сравнению с танцевальным шоу роботов Boston Dynamics в 2020 году. Роботы Unitree продемонстрировали более естественные движения, способность делить сценическое пространство с танцорами-людьми в движении и умение выполнять сложные синхронные акробатические трюки, такие как подбрасывание и ловля в воздухе платка.  Последние несколько лет Unitree целенаправленно работала над улучшением движений своих четвероногих и двуногих роботов. Роботы-собаки, производимые компанией, умеют следовать за владельцем, ловко преодолевая препятствия. Робот G1 ростом 130 см продемонстрировал уверенный бег по каменистой местности, безупречный спуск по лестнице и передвижение приставным шагом по склону. G1 уже доступен в Китае по цене $16 000. Для компании многое поставлено на карту. По данным китайского исследовательского института CCID, только в Китае насчитывается около 80 000 робототехнических компаний, что предполагает ожесточённую конкуренцию в самом ближайшем будущем. Ожидается, что к 2026 году продажи человекоподобных роботов в Китае составят $2,7 млрд, а мировой спрос на них достигнет $38 млрд к 2035 году. Figure планирует выпустить 100 тысяч роботов-гуманоидов в течение следующих 4 лет
02.02.2025 [07:14],
Анжелла Марина
Американская компания Figure по разработке роботов-гуманоидов подписала контракт на их поставку продукции с одной из крупнейших компаний США, а также заявила о намерении выпустить 100 000 таких роботов в течение следующих четырёх лет, сосредоточившись на двух ключевых направлениях — на коммерческом сегменте и на домашнем использовании. 
Источник изображения: Figure По словам генерального директора компании Бретта Эдкока (Brett Adcock), сотрудничество с крупнейшими клиентами позволит Figure производить роботов в больших объёмах, что снизит их себестоимость и ускорит сбор данных для обучения искусственного интеллекта (ИИ). Первым клиентом Figure, о котором было объявлено в декабре, является компания BMW, а имя второго пока держится в секрете, пишет Forbes. Недавно компания Figure была признана одним из двух лидеров среди 16 ведущих компаний в разработке эффективных и доступных роботов-гуманоидов. Их первый робот Figure 01 был выпущен всего через 31 месяц после основания компании, следующая модель Figure 02 уже поставляется клиентам, а робот Figure 03, представляющий из себя ещё более впечатляющую разработку запущен и работает в лаборатории. По словам Эдкока, ключевую роль в развитии роботов играет искусственный интеллект. «На прошлой неделе мы начали использовать нейронную сеть для потребностей нового клиента, — отметил он. — Обучение с помощью ИИ является единственным возможным путём, так как написание алгоритмов вручную здесь невозможно». Он также подчеркнул, что одной из главных целей является выполнение роботами задач с высокой скоростью и производительностью. Для сравнения, скорость Figure 01 составляет лишь 17 % от скорости движения человека, тогда как Figure 02 в семь раз быстрее первой модели. Что касается третьей модели, то она окажется ещё быстрее и функциональнее. Отмечается, что компания в настоящее время не стремится к массовому расширению клиентской базы. Её стратегия заключается в углублении сотрудничества с конкретными крупными клиентами. «В коммерческом секторе наша стратегия заключается в том, чтобы оставаться сосредоточенными на небольшом количестве клиентов, — заявил Адкок. — На раннем этапе для нас более эффективно расти вертикально внутри нескольких клиентов, чем предлагать продукцию многим компаниям». Хотя Адкок и не назвал второго клиента Figure (первым является BMW), по его словам, «это одна из крупнейших компаний США», из чего можно сделать вывод, что это вполне может быть Walmart, Amazon или Apple, а также крупные компании в сфере здравоохранения, такие как UnitedHealth Group и CVS Health. Китайский автопроизводитель GAC представил гуманоидного робота GoMate с 38 степенями свободы
26.12.2024 [19:43],
Сергей Сурабекянц
Китайский автогигант GAC представил на мероприятии в Шанхае полноразмерного колёсного гуманоидного робота GoMate, который умеет переключаться между двуногим и четвероногим режимами. GoMate представляет третье поколение роботов с искусственным интеллектом, разработанное компанией. GAC планирует начать экспериментальное использование GoMate в некоторых отраслях уже в 2025 году, а мелкосерийное производство робота стартует в 2026 году. 
Источник изображений: GAC Во время презентации GoMate продемонстрировал возможности управления движением, навигации и локализации, а также автономного принятия решений. Роботу доступны 38 степеней свободы. Его высота составляет около 1,4 метра в четвероногом и 1,75 метра в двуногом режиме. По утверждению GAC, подобная конструкция улучшает адаптивность и устойчивость робота в сложных условиях и снижает потребление энергии более чем на 80 % по сравнению с аналогичными продуктами. GoMate оснащён полностью твердотельными аккумуляторами GAC. Время работы от одной зарядки, по данным производителя, составляет шесть часов. Компания видит широкие перспективы применения своего робота в таких областях, как безопасность, здравоохранение, вторичный автомобильный рынок, логистика и образование. Кроме того, робот может быть полезен для повышения эффективности и возможностей человека. После периода обучения GoMate будет использоваться на автомобильных производственных линиях GAC для выполнения разнообразных задач. В течение 2025 года робот будет испытываться в пилотном режиме в нескольких отраслях, а в 2026 году GAC планирует начать мелкосерийную сборку GoMate с дальнейшим переходом к массовому производству.  Многие китайские автопроизводители проявляют растущий интерес к производству и использованию гуманоидных роботов. BYD создала специальную лабораторию для разработки продуктов с искусственным интеллектом, включая человекоподобных роботов. Роботы UBTech трудятся на сборочной линии одного из заводов Nio. Xpeng представила человекоподобного робота Iron, который в настоящее время работает на заводах компании. Основатель Li Auto Ли Сян (Li Xiang) также не видит будущего своей компании без гуманоидной робототехники. Главный конкурент Tesla запустил разработку человекоподобных роботов
26.12.2024 [19:28],
Сергей Сурабекянц
Китайская BYD, являющаяся одним из крупнейших производителей электромобилей в мире, создала специальную лабораторию на базе своего 15-го бизнес-подразделения для разработки продуктов с искусственным интеллектом, включая человекоподобных роботов. Это подразделение было создано в 2003 году и до 2019 года носило название FinDreams Technology. Основным направлением его деятельности является разработка и производство автокомпонентов, включая аккумуляторы, двигатели и электронные системы. 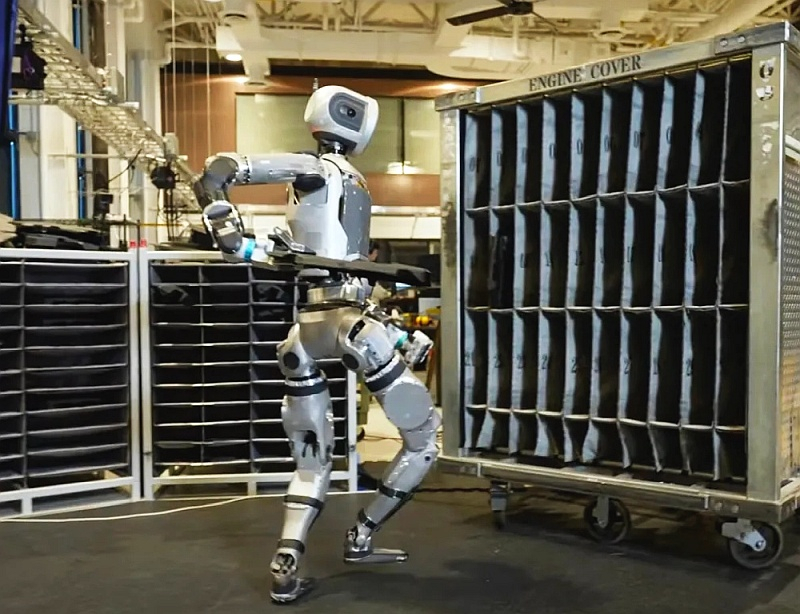
Источник изображения: Boston Dynamics В первой половине этого года 15-е бизнес-подразделение претерпело организационную реструктуризацию. Научно-исследовательский институт технологий, находящийся в его подчинении, выделил часть своего персонала для создания лаборатории искусственного интеллекта. В настоящее время BYD активно привлекает специалистов по созданию гуманоидных роботов, предлагая зарплаты выше рыночного уровня. Перед новой лабораторией поставлена задача разработки промышленных роботов, в первую очередь AGV (automated guided vehicles, «автоматически управляемых транспортных средств»). Другие виды роботов пока находятся на стадии предварительных исследований. В середине декабря BYD разместила объявления о вакансиях на платформе WeChat для выпускников магистратуры и докторантуры университетов со всего мира. В описании вакансий, среди прочего, указаны компетенции в разработке гуманоидных и четвероногих роботов. Ранее BYD уже начала эксперименты с человекоподобными роботами на своих автосборочных предприятиях. 5 ноября производитель человекоподобных роботов UBTech Robotics сообщил об использовании своих роботов на заводах BYD. Другие автопроизводители также активно экспериментируют с человекоподобными роботами. Роботы UBTech трудятся на сборочной линии одного из заводов Nio. Xpeng представила человекоподобного робота Iron ростом 178 см и весом 70 кг, который в настоящее время работает на заводах Xpeng, а в будущем будет доступен для приобретения для компаний и частных лиц. Основатель, председатель и генеральный директор Li Auto Ли Сян (Li Xiang) также не видит будущего своей компании без гуманоидной робототехники. Робот Toyota установил рекорд по броскам мяча в баскетбольное кольцо, но до человека ему ещё далеко
04.12.2024 [19:28],
Геннадий Детинич
Кажется, в обозримом будущем могут появиться Олимпийские игры для роботов, где они будут приносить спортивную славу компаниям и странам, в которых созданы. По крайней мере, Книга рекордов Гиннесса уже начала учитывать спортивные достижения «негуманоидов». Новый рекорд среди роботов установил человекоподобный робот Toyota, выполнивший самый дальний точный бросок в баскетбольное кольцо. 
Источник изображения: Toyota Проект Toyota CUE родился как «гаражная разработка». Несколько сотрудников компании в 2017 году в свободное от работы время начали создавать человекоподобную роботизированную платформу для игры в баскетбол. В версии CUE3, представленной в 2019 году, человекоподобный робот Toyota установил свой первый рекорд бросков в кольцо. Он попал в Книгу рекордов Гиннесса за серию точных бросков с расстояния 3,6 м, совершив 2020 попаданий подряд. После этого разработчики просто выключили его, осознав, что процесс мог продолжаться бесконечно. Самый дальний бросок в баскетбольное кольцо среди людей принадлежит Джошуа Уокеру (Joshua Walker), который отправил мяч в кольцо с расстояния 34,6 м (длина площадки составляет 29 м). Робот Toyota CUE6 метнул мяч в кольцо с расстояния 24,55 м, что стало достижением, занесённым в Книгу рекордов Гиннесса. Попадание произошло со второй попытки: в первый раз мяч ударился о кольцо и отскочил. Робот Toyota CUE6 использует искусственный интеллект и систему обучения для коррекции положения манипуляторов, силы и направления толчка в реальном времени. Для этого в его ноги встроены камеры. Робот не просто наводится на цель и бросает мяч, а рассчитывает траекторию броска в любой момент времени и из любого положения. Помимо точных бросков, робот Toyota CUE6 обучен ряду баскетбольных приёмов. Он одинаково хорошо управляется с мячом как правой, так и левой рукой, меняет позы и перемещается по площадке. Команда инженеров Toyota, разрабатывающая его, надеется в будущем создать идеального роботизированного игрока в волейбол. Tesla объяснила, что улучшила в новых руках человекоподобного робота Optimus
30.11.2024 [17:05],
Алексей Разин
Недавняя демонстрация человекоподобного робота Tesla Optimus, который на видео ловил теннисные мячи своей обновлённой кистью руки, в первую очередь привлекала плавностью и естественностью движений конечности, но представители компании не стали скрывать, что роботом в очередной раз управлял человек. Зато они рассказали, что изменилось в устройстве новых рук робота. 
Источник изображения: X, Tesla Optimus Как поясняет Electrek, руководитель проекта Optimus Милан Ковач (Milan Kovac) рассказал об изменениях, которым подверглись руки робота, полученные им буквально в подарок на так называемую «чёрную пятницу». По словам представителя Tesla, новые манипуляторы ещё предстоит доработать к концу текущего года, преимущественно в части способности новых рук тактильно распознавать различные типы поверхности. В этом новые руки робота значительно превосходят предшествующий вариант, причём особой сложностью при их создании было сохранение адекватной чувствительности с учётом появления внешнего покрытия, напоминающего человеческие кожу и плоть. По словам Ковача, новая рука получила защитное покрытие на пальцах и ладони, которое достаточно мягкое и податливое на ощупь, но при этом позволяет тактильно распознавать различные поверхности с приемлемой точностью. Кинематику пальцев удалось существенно улучшить за счёт появления некоего подобия человеческих сухожилий. Исполнительные устройства, которые приводят их в движение, при этом сосредоточены в предплечье. Это немного увеличило массу соответствующей части руки робота, но по сравнению с предшествующим вариантом оптимизация массы предплечья также была проведена. Как отмечалось ранее, кисть робота Optimus имеет 22 степени свободы, лишь незначительно уступая человеческой, ещё три степени свободы добавляют запястье и предплечье. Столь точное следование человеческой анатомии будет полезно не столько при производстве человекоподобных роботов, сколько при создании бионических протезов, которыми смогут пользоваться лишившиеся верхней конечности люди. Соответствующие планы глава Tesla Илон Маск (Elon Musk) упоминал публично. |
|
✴ Входит в перечень общественных объединений и религиозных организаций, в отношении которых судом принято вступившее в законную силу решение о ликвидации или запрете деятельности по основаниям, предусмотренным Федеральным законом от 25.07.2002 № 114-ФЗ «О противодействии экстремистской деятельности»; |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.







 MWC 2018
MWC 2018 2018
2018 Computex
Computex