Опрос
|
реклама
Быстрый переход
Переломного «ChatGPT-момента» в сфере человекоподобных роботов придётся ждать ещё до 10 лет
30.03.2026 [17:59],
Алексей Разин
Пока специалисты спорят о правомерности использования термина «искусственный интеллект», мало кто может усомниться в существенном влиянии выхода ChatGPT осенью 2022 года на отрасль информационных технологий и мировую экономику в целом. Производители человекоподобных роботов считают, что для них такой прорыв станет возможен ещё через два или десять лет. 
Источник изображения: UBTech Robotics По крайней мере, подобные оценки приводили выступавшие на конференции Boao Forum эксперты, на которых ссылается Channel News Asia. Председатель правления Daxiao Robotics Ван Сяоган (Wang Xiaogang) считает, что подходящий момент для прорыва в развитии человекоподобных роботов наступит уже через пару лет: «Мы должны масштабировать данные до существенно более высокого уровня, и благодаря применению моделей мира и симуляции сможем ускорить этот процесс». Такой подход к обучению робототехнических систем пропагандирует и основатель Nvidia Дженсен Хуанг (Jensen Huang), который призывает использовать цифровые двойники для симуляции физических процессов и ускорения прогресса в сфере робототехники. Глава робототехнического подразделения Vivo Шао Хао (Shao Hao) считает, что до прорыва в области применения человекоподобных роботов пройдёт около десяти лет. По его словам, проблемой отрасли является отсутствие достаточного количества данных из реального мира с приемлемой стоимостью, которые могли бы использоваться для обучения роботов применению во всём многообразии окружающего мира. Участники рынка сходятся во мнении, что одномоментно никаких прорывов происходить не будет, отрасль будет развиваться поэтапно и постепенно, добиваясь эволюционных изменений в разных сферах. В этом году китайские разработчики впечатлили публику демонстрацией хореографических и акробатических способностей человекоподобных роботов во время большого новогоднего концерта, который транслировался на всю страну. Роботы демонстрировали приёмы единоборств и исполняли акробатические трюки, но специалисты признают, что эти движения были заучены на примере живых хореографов, а сама презентация проходила в строго статичных и предсказуемых условиях. Чтобы роботы смогли уверенно и безопасно действовать в реальной бытовой обстановке, их нужно ещё очень долго обучать. Доступ к достаточному объёму дешёвых данных для такого обучения может стать «узким местом» для всей робототехнической отрасли в ближайшее время, как сходятся во мнении участники рынка. Кроме того, кинетические способности роботов всё ещё требуют совершенствования, у них есть проблемы со стабильностью и надёжностью. Определённые барьеры предстоит преодолеть и в общественном сознании с точки зрения доверия к роботам, которые будут функционировать бок о бок с людьми. Приглашённая на мероприятие в Китае бывшая премьер-министр Новой Зеландии Дженни Шипли (Jenny Shipley) заявила, что от роботов люди не должны ожидать способности делать эмоциональные суждения. По её мнению, в их задачи это входить не должно. Определённую подготовку к массовому применению человекоподобных роботов следует провести на уровне стандартов безопасности и социальной политики. Если роботы будут заменять людей в целом ряде профессий, высвобождающимся человеческим ресурсам необходимо будет найти достойное применение. Кроме того, активный сбор визуальной звуковой информации, который необходим роботам для сосуществования с людьми в одном пространстве, не должен представлять угрозы для информационной безопасности. Сингапур в этой сфере уже предложил рамочные правила для регулирования применения ИИ-агентов, и робототехническая отрасль может последовать этому примеру. Бывшая премьер-министр Новой Зеландии добавила, что её в условиях бурного развития ИИ беспокоит непрозрачность структуры управления и распределения ответственности: «Я не знаю, кто сейчас за рулём. Я понимаю, что кто-то управляет процессом, но не могу понять, кто именно». По её словам, при массовом распространении человекоподобных роботов важно обеспечить социальную стабильность во всех странах, поскольку бесконтрольное внедрение таких технологий чревато социальными и экономическими потрясениями. Dreame назвали мировым лидером на рынке премиальных роботов-пылесосов
26.03.2026 [13:36],
Павел Котов
Компания Dreame вышла на первое место в мире по объёмам розничных продаж роботов-пылесосов премиум-класса, гласят данные международной исследовательской компании Euromonitor International по итогам 2025 года. 
Источник изображений: Dreame Dreame стала первой по продажам роботов-пылесосов по цене от $700 в 30 регионах и странах мира; на 18 важнейших рынках доля компании оказалась выше 40 % — её позиции укрепились в странах Европы, Северной Америки и стран СНГ. Компания специализируется на выпуске передовой техники для дома и персонального ухода. Одним из основных направлений деятельности Dreame остаются роботы-пылесосы — важнейшими для этих устройств являются удобство в работе пользователей и технологические решения в продукции.  Производитель активно инвестирует в направления исследований и разработки — по этим направлениям заняты до 70 % его сотрудников; на технологическое развитие компания передаёт более 7 % годовой выручки. На конец 2025 года за ней числились более 10 тыс. патентных заявок, из которых зарегистрированы более 3 тыс. Продукция Dreame продаётся в более чем 120 странах и регионах мира, а также используется в более чем 42 млн домохозяйств. В розничной сети бренда работают более 6500 магазинов.  Компания не ограничивается отдельными категориями оборудования — сейчас она начала развивать экосистемный подход к ассортименту. В этом году была представлена концепция Dreame Universe, объединяющая продукцию по направлениям товаров для дома, персонального ухода, транспорта, воздушной среды, наземных устройств и вычислительных решений. Активно развивается направление искусственного интеллекта: налажено сотрудничество с Nvidia, запланирована интеграция технологий ИИ в продукцию Dreame. «Яндекс» выпустит роботов-доставщиков ещё в пять городов России
24.03.2026 [11:42],
Павел Котов
География присутствия роботов «Яндекса» расширилась на пять новых городов: Химки, Люберцы, Одинцово, Долгопрудный и Нижний Новгород. Они также появятся в Ново-Савиновском и Советском районах Казани. Ранее роверы появились в Москве, Санкт-Петербурге, Мурино, Казани и Иннополисе. 
Источник изображений: yandex.ru/company В новых городах Московской области и в новых районах Казани роботы «Яндекса» начнут работать уже в апреле. В нижегородских Сормовском, Московском и Канавинском районах они появятся в июне. На начальных этапах роверы ограничатся развозом заказов из «Яндекс Лавки», а впоследствии станут обслуживать сервисы «Яндекс Еда» и «Яндекс Доставка». Сейчас в новых городах и районах присутствия уже появились роботы-картографы, которые занимаются составлением подробных карт местности, чтобы роверы справлялись со своей задачей, невзирая на погоду и время суток.  По новым маршрутам побегут роботы четвёртого поколения — «Яндекс» анонсировал их осенью минувшего года. Эти машины могут похвастаться более высокой проходимостью, более качественным лидаром и более низкой себестоимостью; кроме того, они впервые запущены в серийное производство. С 2020 года роботы-доставщики «Яндекса» обслужили 1 млн заказов — и только в последний год совершили столько же доставок, сколько за всю свою предыдущую историю. До конца 2027 года компания намеревается произвести 20 000 роботов четвёртого поколения — они постепенно заменят все экземпляры предыдущих моделей. Автоматизированная доставка становится дешевле, добавили в «Яндексе»: стоимость обслуживания роботов уже сравнима с оплатой труда курьеров. Китайские учёные научили робота играть в теннис новым методом обучения
19.03.2026 [14:30],
Владимир Мироненко
Китайские исследователи протестировали новый, гораздо более быстрый и простой метод обучения роботов игре в теннис, который, судя по результатам, можно считать прорывом в машинном обучении и реальном ИИ, сообщил ресурс New Atlas. 
Источник изображений: Zhang et al, Tsinghua university В теннисе, как и в большинстве других видов спорта, технологии захвата движений пока не могут считывать мельчайшие нюансы угла запястья при ударе по мячу, чтобы выполнять его с необходимой точностью. Ситуация на теннисном корте слишком динамична, чтобы использовать дистанционное управление, утверждают исследователи. По словам исследователей, попытки извлечения такой информации из многокамерных видеозаписей с помощью программного обеспечения для обучения ИИ, такого как Vid2Player3D от Nvidia, являются «сложным процессом», который «может потребовать значительных экспертных знаний и инженерных усилий». Вместо этого исследователи разработали систему LATENT, основанную на захвате движений, но только для базовых элементов техники и предназначенную для работы с неполными данными. В ходе текущего эксперимента исследователи использовали данные захвата движений за пять часов, в которых спортсмены демонстрировали «примитивные навыки» игры в теннис: удары справа и слева, боковые перемещения и перекрёстные шаги, выполняемые на площади, составляющей лишь часть стандартного теннисного корта. 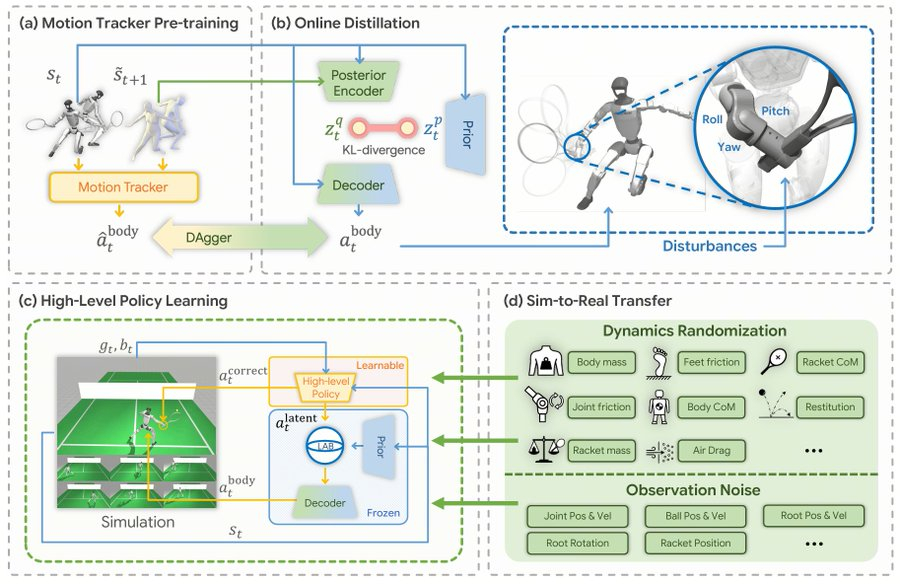 Исследователи обработали эти данные с помощью камер, чтобы создать репертуар человекоподобных «пространств движения», а затем загрузили эти базовые навыки в гуманоидного робота G1 от Unitree, доступного по цене $13,5 тыс. Используя базовые навыки, робот должен был с помощью системы LATENT выполнить поставленную задачу — увидеть приближающийся теннисный мяч и с помощью ракетки перебросить его через сетку: «Успех — это когда мяч приземлится на противоположной стороне корта в пределах площадки, ограниченной белыми линиями». Обладая базовыми навыками ударов по мячу, робот мог экспериментировать со всеми остальными деталями: углами, временем, выбором движений для различных ситуаций и моментами, когда следует выходить за рамки обученных движений. Подавляющая часть обучения проходила с очень высокой скоростью с использованием симуляции. В результате G1 успешно отбивал удары справа примерно в 90 % случаев и удары слева — чуть менее чем в 80 %, причём его движения выглядят ловкими и плавными, как у настоящего теннисиста. Конечно, робот пока не готов к соревновательным матчам, но вместе с тем он добился значительного прогресса в освоении игры. Хотя это не совсем та рутинная, монотонная работа, которую, как ожидается, роботы будут выполнять вместо людей, благодаря разработке китайских исследователей они смогут быстро обучаться управлять своим телом в экстремальных условиях и справляться со сложными и динамичными ситуациями, что будет полезно в более практических задачах. Программное обеспечение LATENT относится к категории open source и доступно на GitHub. Китай разгоняет роботизацию: объёмы выпуска промышленных роботов выросли на 31 % с начала года
17.03.2026 [16:07],
Алексей Разин
Развитие робототехнической отрасли КНР относится к числу приоритетных направлений в китайской экономике, а потому поддерживается на уровне правительственных программ. В сочетании с высоким спросом на робототехнические изделия это привело к росту объёмов производства промышленных роботов в КНР на 31 % по итогам двух первых месяцев текущего года. 
Источник изображения: UBTech Robotics Об этом со ссылкой на государственные органы статистики КНР сообщило вчера издание South China Morning Post. В общей сложности за январь и февраль текущего года в КНР было выпущено 143 608 промышленных роботов, что на 31 % больше показателей аналогичного периода прошлого года. Характерно, что за первые два месяца 2025 года прирост в этой сфере ограничился 27 %. Всего по итогам прошлого года в Китае было выпущено 773 074 промышленных робота, что соответствует приросту на 28 % по сравнению с 2024 годом. Так называемые сервисные роботы представляют более многочисленную группу в статистике, но демонстрируют гораздо более скромную динамику роста объёмов производства. Так, за первые два месяца этого года в КНР было произведено 2,54 млн сервисных роботов, а прирост по сравнению с аналогичным периодом прошлого года не превысил 1 %. Отчасти на статистику повлияли изменения в методике подсчёта, как признают китайские органы власти. С прошлого года количество игроков рынка в сегменте сервисных роботов, передающих соответствующие данные, выросло. Китай в прошлом году оставался крупнейшим рынком сбыта промышленных роботов: здесь было реализовано 54 % всех выпущенных в мире роботов этого типа. Китайские компании установили 295 000 промышленных роботов в прошлом году — заметно больше, чем японские (44 500 роботов) или американские (34 200 роботов). Человекоподобные роботы всё чаще находят применение на производственных предприятиях. Если ранее они считались не очень выгодными с точки зрения такого варианта эксплуатации, то по мере снижения цен и совершенствования программного обеспечения универсальность роботов подобной компоновки выходит на передний план. Тем более что производителям роботов проще научить их функционировать в интерьере производственных цехов, чем во всём многообразии бытовых условий на потребительском рынке. В домах человекоподобные роботы появятся через несколько лет именно по причине отставания в разработке программного обеспечения для таких условий эксплуатации. Китайские автопроизводители охотно внедряют человекоподобных роботов на своих конвейерах, пусть пока и не для самых ответственных операций. Xiaomi, например, недавно удалось продемонстрировать способность человекоподобных роботов на протяжении трёх часов подряд участвовать в сборочных операциях на конвейере без вмешательства со стороны человека. В ближайшие пять лет Xiaomi собирается буквально наводнить человекоподобными роботами собственной разработки свои автосборочные предприятия в Китае. Китайская компания UBTech Robotics договорилась о сотрудничестве с немецкой Siemens Industrial Software, чтобы добиться прогресса в совершенствовании своих роботов. Опыт немецкого партнёра будет использоваться при разработке и производстве человекоподобных роботов. К концу 2026 года UBTech намеревается выйти на ежегодный выпуск 100 000 роботов такого типа. Китайцы создали робоконя — он может нести всадника весом до 50 кг по бездорожью
17.03.2026 [12:47],
Геннадий Детинич
Пока техногики ожидают футуристический четвероногий мотоцикл компании Kawasaki, китайцы готовы предложить альтернативу уже сейчас. Компания DEEP Robotics из Ханчжоу представила ограниченную серию робота в форме лошади, приуроченную к нынешнему Году Лошади по восточному календарю. Лошадь — громко сказано. Это «пони» высотой 50 см в холке. Но 50 кг груза на своей спине она понесёт, буквально цокая «копытами» как по асфальту, так и по бездорожью. 
Источник изображений: DEEP Robotics Представленная модель создана на базе промышленной платформы DEEP Lynx M20 Pro и сочетает «биологический» дизайн, имитирующий пропорции и движения настоящей лошади, с высокотехнологичными возможностями четвероногого робота. Анатомия конечностей строго соблюдена: у модели Lynx M20 Pro «коленки» смотрят внутрь, а у лошадки — наружу, как и положено животному. При этом тщательно выполнены «копыта», тогда как у четвероногой робоплатформы конечности заканчиваются сугубо утилитарными опорами. Поведение лошадки на видео ниже выглядит просто потрясающе. Согласно заявленным техническим характеристикам, робо-лошадь весит около 30 кг, высота в холке (от уровня земли до соединения шеи и спины) составляет чуть больше полуметра. Платформа способна нести полезную нагрузку до 50 кг. Максимальная скорость достигает 5 м/с (18 км/ч), однако для оптимальной устойчивости рекомендуется двигаться вдвое медленнее. Устройство оснащено 96-канальным лидаром и технологией SLAM, обеспечивающими круговой обзор и автономный обход препятствий, а также имеет защиту уровня IP66, позволяющую работать под дождём, в грязи и пыли в температурном диапазоне от −20 до +55 °C. Батареи быстросъёмные, с возможностью горячей замены, а одной зарядки хватает примерно на три часа работы. Основное предназначение робота — развлечение и демонстрация возможностей, что при цене устройства на уровне $50 тыс. можно принять и простить. Тем не менее утилитарное использование подобной платформы вполне очевидно: это помощь в перемещении грузов по пересечённой местности. С учётом особого таланта робопсов DEEP Robotics к паркуру на склонах горных речек, робо-лошадки компании также должны демонстрировать схожую ловкость при движении. Наконец, это просто красиво. Остаётся только ждать появления других обычных и экзотических робосуществ, чьи образы будут ограничены лишь фантазией дизайнеров. Инженеры уже могут — они это доказали. Робопсы нашли работу в дата-центрах — они проверяют оборудование, ищут перегрев и патрулируют ЦОД
17.03.2026 [12:22],
Алексей Разин
Крупные центры обработки данных обладают не только обширной территорией, но и разнообразным оборудованием, за состоянием которого необходимо тщательно следить. Когда камер и датчиков для решения подобных задач не хватает, конкуренцию людям могут составить собакоподобные роботы. 
Источник изображения: Boston Dynamics Старший директор по управлению продуктами Boston Dynamics Мерри Фрейн (Merry Frayne) призналась, что интерес к таким роботам со стороны компаний, занимающихся строительством центров обработки данных, по сравнению с прошлым годом заметно вырос. Аналогичные роботы уже применяются в нефтяной и горнодобывающей промышленности, в военных операциях и при ликвидации последствий стихийных бедствий. С учётом масштабов строительства ЦОД в США, применение собакоподобных роботов для патрулирования территории стало очевидным. Сейчас в Северной Америке возводятся центры обработки данных совокупной мощностью 35 ГВт, они занимают десятки гектар и требуют контроля в круглосуточном режиме. В США в строй уже введены 5000 центров обработки данных, в стадии строительства находятся от 800 до 1000 штук. Для производителей роботов и операторов ЦОД подобное применение «четвероногих инспекторов» является взаимовыгодным. Клиенты Boston Dynamics, впрочем, не желают ограничиваться только функцией патрулирования. Роботы настраиваются на создание карты помещений и площадок, мониторинг процесса строительства, поиск протечек и очагов перегрева оборудования, а также акустических аномалий и непосредственно охраны объектов. Если учесть, что один робопёс Spot стоит от $175 000 до $300 000, то его применение в ЦОД может окупаться за период от полутора до двух лет, и это без учёта экономического эффекта от сбора данных, который обеспечивает робот. Конкурирующая Ghost Robotics своих робопсов предлагает Vision 60 по цене около $165 000, они также используются на подобных объектах. Затраты на одного человека в роли охранника в США достигают $150 000, поэтому робопсы при более высоких начальных расходах в дальнейшем позволяют экономить, выполняя свою работу практически непрерывно, если не считать время на перезарядку. Собственно, людей такие роботы не вытесняют полностью, они просто позволяют перейти инспекторам к удалённому наблюдению за обстановкой на объекте через транслируемые с камер робота изображения. Человек и робот в данной комбинации дополняют друг друга. На одном заряде батареи робот способен преодолеть многие километры в любых погодных условиях, в этом отношении он более неприхотлив по сравнению с человеком. Кроме того, тепловые датчики позволяют роботам определять перегрев оборудования и посылать уведомления операторам, чтобы предотвратить выход из строя дорогостоящего «железа» или пожар. Игроки в Pokemon Go годами неосознанно обучали роботов-курьеров
15.03.2026 [19:42],
Владимир Фетисов
Почти десять лет прошло с тех пор, как игра Pokemon Go дала пользователям возможность находить в реальном мире виртуальные объекты. Приложение с поддержкой дополненной реальности побудило сотни миллионов игроков бродить по паркам, автостоянкам и другим местам в поисках покемонов. Прошли годы и пик популярности игры остался позади, но теперь оказалось, что ловля цифровых существ сможет помочь роботам-курьерам быстрее доставлять заказы. 
Источник изображения: Niantic На этой неделе Niantic Spatial, часть стоящей за Pokemon Go команды, объявила о партнёрстве с компанией Coco Robotics, которая занимается производством роботов для доставки продуктов питания на короткие расстояния. В скором времени эти роботы будут перемещаться по улицам, используя систему визуального позиционирования (VPS) от Niantic. По данным источника, эта система способна определять местоположение с точностью до нескольких сантиметров, просто «глядя» на близлежащие здания и другие ориентиры. Система VPS компании Niantic обучалась на более чем 30 млрд изображений, сделанных игроками в Pokemon Go. Разработчики уверяют, что она поможет роботам лучше ориентироваться в местах, где GPS неэффективен. Другими словами, всё то время, которое пользователи Pokemon Go проводили, бродя по окрестностям городов, теперь будет определять, насколько быстро робот-курьер сможет доставить тот или иной заказ. Это яркий пример того, как краудсорсинговые данные, собранные, казалось бы, для одной цели, могут быть перепрофилированы спустя годы для чего-то совершенно нового. «Оказалось, что задача заставить Пикачу реалистично бегать повсюду и задача заставить робота Coco безопасно и точно перемещаться в реальном мире — это, по сути, одна и та же задача», — заявил генеральный директор Niantic Spatial Джон Ханке (John Hanke) во время недавнего интервью для MIT Technology Review. В отличие от работающего на основе спутников GPS, система VPS определяет местоположение объекта на основе его окружения. Это делает Pokemon Go особенно полезным источником данных, поскольку игрокам приходилось добираться до разных мест и направлять камеры своих смартфонов под разными углами в точке обнаружения покемона. Эти картографические усилия получили импульс в 2020 году, когда в приложении появился раздел «Полевые исследования», который побуждал игроков снимать реальные статуи и другие достопримечательности в обмен на внутриигровые награды. 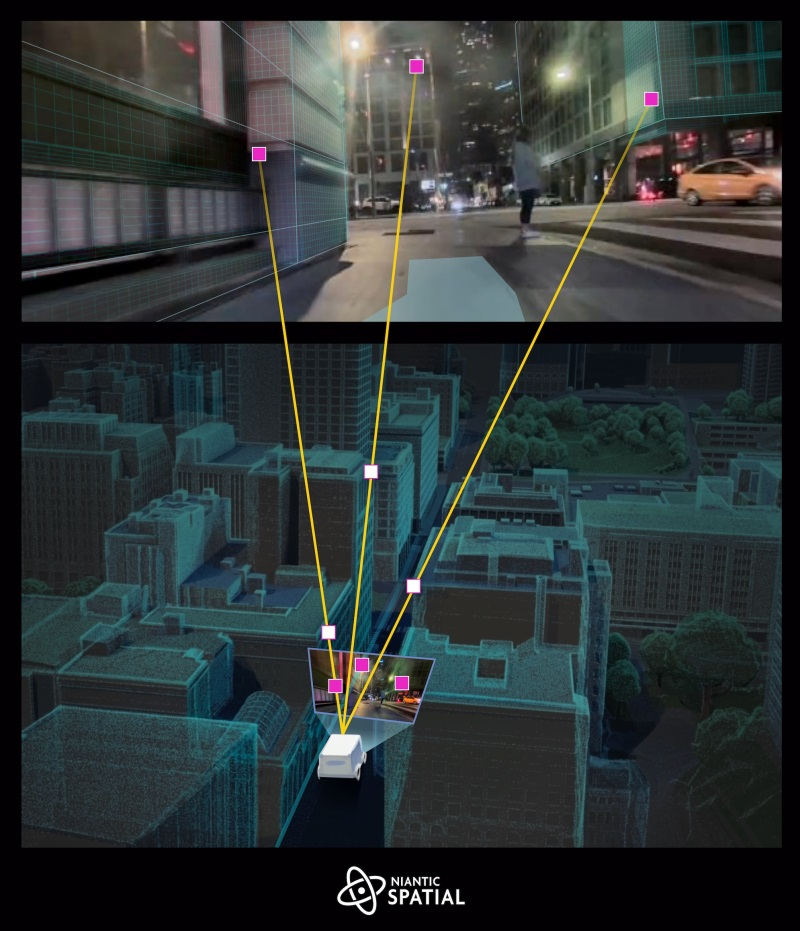
Источник изображения: Coco Robotics Знали об этом игроки или нет, но собранные ими данные позволили сформировать 3D-модели объектов из реального мира, ставшие основой для обучения VPS-системы Niantic. Больше данных означает повышение точности. Поскольку компания собирала сканы одних и тех же мест от множества разных пользователей, у разработчиков была возможность запечатлеть одни и те же места в разных погодных условиях, при разном освещении, под разными углами и с разной высоты. Очевидно, недостатка в данных не было. На пике популярности в 2016 году Pokemon Go насчитывала около 230 млн активных пользователей в месяц. Хотя сейчас Pokemon Go не так популярна, в неё по-прежнему играют около 50 млн человек. Niantic и Coco делают ставку на то, что данные Pokemon Go помогут роботам-курьерам точно определять своё местоположение, просто глядя на окружающие их ориентиры. Хотя многие автономные роботы сейчас в той или иной мере полагаются на GPS для навигации, спутниковая система не всегда надёжна. Роботы-курьеры, протестированные в университетских городках, часто терялись и с трудом справлялись с переходом через дорогу на другую сторону улицы. Из-за этого доставка заказов может задерживаться. Причём нестабильная работа GPS может наблюдаться не только в отдалённых районах, но и в густонаселённых городах с большим количеством зданий, создающих препятствия для прохождения сигналов связи. Идея Coco в том, чтобы роботы-курьеры задействовали систему VPS и четыре камеры для получения значительно более точных данных об окружающей обстановке. В более обширном масштабе Niantic рассматривает партнёрство с Coco, как часть долгосрочных усилий по созданию «живой карты» мира. Как только роботы с системой VPS от Niantic выйдут на улицы, они станут собирать ещё больше информации, которая может использоваться для повышения точности работы модели VPS. Figure показала, как робот на базе Helix 02 убирает гостиную с той же скоростью, что и человек
11.03.2026 [06:38],
Анжелла Марина
Калифорнийская компания Figure опубликовала видео, на котором её человекоподобный робот Figure 03 самостоятельно наводит порядок в гостиной. Робот собрал разбросанные игрушки, поправил подушки на диване и протёр поверхность мебели — без какого-либо вмешательства человека. 
Источник изображения: Figure Робот работает на основе запатентованной фирменной системы искусственного интеллекта Helix 02, использующей архитектуру vision-language-action. Как пишет Notebookcheck, система позволяет Figure 03 понимать речевые команды и взаимодействовать с объектами в реальной обстановке. Кроме того, робот способен справляться с новыми задачами без дообучения и со скоростью, сопоставимой с движениями человека. Хотя такой темп для роботов нетипичен, однако именно он позволяет работать в жилом пространстве, не создавая лишнего шума и дискомфорта для людей. Домашняя среда традиционно считается одной из самых сложных для роботов. В отличие от хорошо структурированных заводских или складских помещений, обстановка в жилых комнатах постоянно меняется: предметы разбросаны хаотично, пространство для навигации ограничено, а захват мягких объектов представляет определённую трудность в отличие от промышленных деталей. Несмотря на это, Figure 03 справился с задачей, продемонстрировав способность действовать обеими руками и одновременно перемещаться по комнате. Figure пока не делает громких заявлений о готовности робота к коммерческим продажам. Демонстрация скорее призвана показать технологический прогресс на фоне растущей конкуренции в этом секторе. Например, недавно на выставке MWC 2026 компания Honor удивила публику танцующим роботом, а XPeng пришлось разбирать свою модель, чтобы убедить зрителей, что под костюмом не прячется человек. Параллельно Samsung анонсировала планы по внедрению человекоподобных роботов в собственное производство. DJI заплатила $30 000 пользователю, случайно взломавшему 7000 роботов-пылесосов Romo
07.03.2026 [13:13],
Павел Котов
В феврале стало известно, что у роботов-пылесосов DJI Romo обнаружены несколько уязвимостей. Владелец такого устройства, пытаясь управлять им с помощью геймпада от Sony PlayStation, обнаружил целую сеть из 7000 дистанционно управляемых роботов, через которые можно было заглядывать в чужие дома. Производитель решил выплатить этому человеку вознаграждение в размере $30 000. 
Источник изображения: dji.com DJI выплатила обнаружившему уязвимость Сэмми Аздуфалю (Sammy Azdoufal) вознаграждение в размере $30 000, сообщила она ресурсу The Verge, но не упомянула имени этого человека и не уточнила, за выявление какой именно уязвимости перечислены средства. Сэмми Аздуфаль, в частности, обнаружил уязвимость, которая позволяет просматривать видеопоток с роботов-пылесосов DJI Romo без необходимости вводить PIN-код — эту ошибку производитель, по его собственному заявлению, устранил «к концу февраля». Была, впрочем, обнаружена ещё одна уязвимость, более опасная, и о её природе СМИ сообщать не стали. DJI упомянула и про неё. «Мы также начали модернизацию всей системы. Она включает в себя серию обновлений, которые, как мы ожидаем, будут полностью развёрнуты в течение месяца», — отметили там. Компания опубликовала в своём блоге сообщение об усилении безопасности роботов-пылесосов Romo, отметила, что обнаружила проблемы самостоятельно, но поблагодарила «двух независимых исследователей в области безопасности» за проделанную работу. В DJI напомнили, что Romo получил сертификаты безопасности ETSI, EU и UL, — и это поднимает вопросы об их истинной ценности, если один человек с помощью сервиса Claude Code пробился в сеть роботов-пылесосов. В компании заявили о своей «приверженности углубить взаимодействие с сообществом исследователей в области безопасности, и вскоре мы представим партнёрам новые способы взаимодействия с нами». Гуманоидный робот Xiaomi поработал на сборке автомобилей — как надо закручено 9 гаек из 10
02.03.2026 [19:14],
Сергей Сурабекянц
Человекоподобный робот Xiaomi в полностью автономном режиме успешно отработал в течение 3 часов подряд на станции сборки самонарезающих гаек на заводе по производству электромобилей компании. Согласно результатам испытаний, робот совершил 90,2 % успешных операций, уложившись в самые жёсткие требования цикла производственной линии. 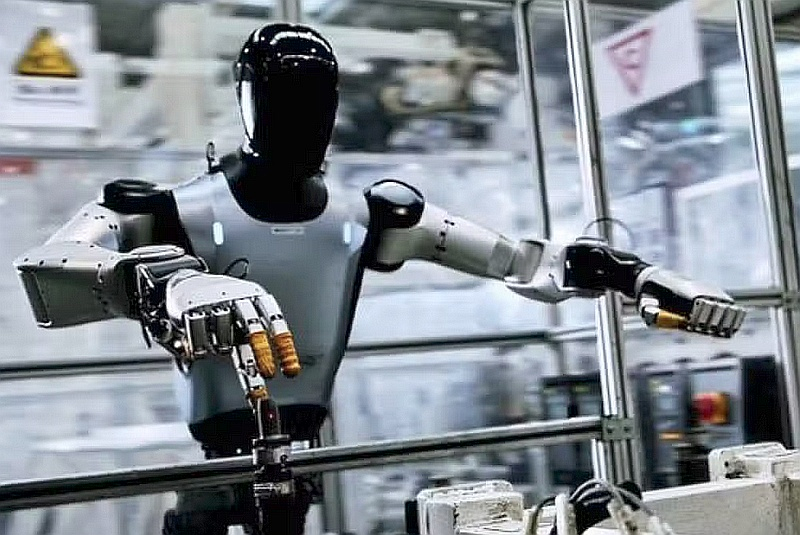
Источник изображения: Xiaomi Компания Xiaomi сделала важный шаг в развитии воплощённого интеллекта, официально внедрив своего человекоподобного робота на реальный автомобильный завод для участия в сложных работах по сборке компонентов. Он успешно проработал 3 часа подряд в автономном режиме на станции установки самонарезающих гаек в цехе литья под давлением. Задача робота состояла в точном захвате гаек из автоматического подающего устройства и установке их на позиционирующие приспособления. Процесс осложнялся необходимостью координации действий робота с работой конвейера. По словам Xiaomi, наибольшая сложность заключалась в точности выравнивания и надёжности зацепления самонарезающих гаек. Шлицевая структура внутри гаек, нефиксированное положение захвата и помехи от магнитных сил значительно увеличивают сложность сборки. 
Источник изображения: Futurama Для решения этих проблем Xiaomi применила комплексный подход к управлению на основе данных. Это решение использует разработанную внутри компании большую модель VLA (Vision-Language-Action) с 4,7 миллиардами параметров, Xiaomi-Robotics-0, в сочетании с технологией обучения с подкреплением. Эта объединённая система обучения снижает зависимость от реальных данных телеуправления. Она позволяет роботу быстро адаптироваться к различным условиям работы и непрерывно учиться на основе взаимодействия с физической средой. Кроме того, Xiaomi интегрировала мультимодальную информацию, включая зрение, тактильную обратную связь и проприоцепцию (мышечное чувство) суставов. Это снижает вероятность ошибочной оценки состояний в сложных сценариях, повышая операционную стабильность и надёжность. Для управления движением всего тела использовалась гибридная архитектура, интегрирующая оптимизационное управление с обучением с подкреплением. Контроллер прошёл обучение на сотнях миллионов смоделированных случайных возмущений в виртуальной среде. На каждую итерацию контроллер тратил менее 1 миллисекунды, обеспечивая отклик системы в реальном времени. Это позволило роботу сохранять равновесие в экстремальных условиях и обеспечило перенос навыков на реальных роботов без предварительного обучения. 
Источник изображения: unsplash.com Xiaomi заявила, что станция для сборки самонарезающих гаек является первым шагом в масштабировании применения человекоподобных роботов в автомобильной промышленности. В настоящее время компания проводит развёртывание и проверку роботов на нескольких других типичных рабочих станциях. К ним относятся такие задачи, как захват контейнеров и установка передней эмблемы. Xiaomi сосредоточена на преодолении основного узкого места «времени производственного цикла и коэффициента выхода годной продукции» для обеспечения более широкого промышленного внедрения. Глава Xiaomi Лэй Цзюнь (Lei Jun) ожидает появления большого количества человекоподобных роботов на заводах Xiaomi в течение следующих пяти лет. Достижения Xiaomi в области робототехники происходят на фоне массированных инвестиций со стороны технологических компаний в воплощённый интеллект. Конкуренты активно продвигают массовое производство и применение роботов. Генеральный директор Tesla Илон Маск (Elon Musk) ранее заявлял, что к концу 2026 года робот Optimus сможет выполнять сложные комплексные задачи. Tesla планирует запустить серийную версию своего человекоподобного робота третьего поколения в первом квартале этого года. 
Источник изображения: Tesla Китайский производитель электромобилей Xpeng также ускоряет внедрение робототехники. В планах компании начать уже в текущем квартале строительство первой в отрасли базы массового производства человекоподобных роботов в Гуанчжоу и запустить массовое производство к концу 2026 года. 
Источник изображения: Xpeng Lenovo представила настольный «шар с глазками» — концепт робота-помощника AI Workmate с проектором и ИИ
02.03.2026 [02:01],
Николай Хижняк
Lenovo представила Lenovo AI Workmate Concept — концепт цифрового помощника на базе искусственного интеллекта, воплощённого в физической форме. Решение переосмысливает взаимодействие пользователей с интеллектуальными системами в их повседневной работе. 
Источник изображений: Lenovo Устройство напоминает настольную лампу на эргономичной подставке. Однако на самом деле это настольный робот, оснащённый экраном и поддержкой различных функций, предназначенных для повышения продуктивности в повседневных рабочих процессах.  Он поддерживает текстовое, голосовое, жестовое и пространственное взаимодействие, при этом ввод обрабатывается локально встроенным ИИ. Помимо традиционных функций помощи — например, поиска информации, предоставления подсказок или планирования встреч, — Lenovo AI Workmate предназначен для поддержки практических бизнес-задач, таких как сканирование и обобщение документов, организация заметок, а также помощь в создании презентаций и другого рабочего контента.  В рамках концепта устройство также оснащено проектором, с помощью которого можно демонстрировать презентации более широкой аудитории. Контент может проецироваться на близлежащие поверхности, такие как стол или стена. Honor показала своего первого робота — он танцует и крутит бэкфлипы
01.03.2026 [20:54],
Анжелла Марина
В рамках выставки MWC 2026 компания Honor представила ряд новых продуктов, однако центральным событием мероприятия стал анонс первого гуманоидного робота бренда. Робот продемонстрировал зрителям бэкфлип, потанцевал, а также обменялся рукопожатием с одним из руководителей компании прямо на сцене.  Робот, получивший название Honor Humanoid Robot, представляет собой, по заявлению компании, «идеальное сочетание персонального интеллекта и периферийного интеллекта». Такая архитектура позволяет устройству глубоко понимать потребности пользователей и анализировать данные при одновременном обеспечении конфиденциальности и защите приватности владельца. В Honor назвали этот проект масштабным стратегическим шагом, который направлен на создание большего количества роботов потребительского класса. 
 На данном этапе разработчики выделяют три приоритетных сценария использования новинки. Робот будет применяться для помощи покупателям в торговых центрах, проведения инспекций на рабочих местах и выполнения роли компаньона. В компании подчеркнули отличие своего подхода от стратегий традиционных производителей робототехники и отметили, что намерены использовать накопленные знания о поведении пользователей смартфонов и подключенных устройств для создания более интуитивного взаимодействия человека и машины.  Непосредственно на MWC 2026 наибольший интерес аудитории вызвали двигательные способности робота, которые выходят далеко за рамки стандартного выполнения бытовых задач или уборки.  Устройство исполнило перед зрителями сложный акробатический элемент в виде сальто назад, продемонстрировало танцевальные движения, включая знаменитую «лунную походку», подтвердив тем самым высокий уровень координации и баланса, достигнутый инженерами компании при разработке механической части и программного обеспечения. Xiaomi удвоит расходы на исследования до $29 млрд и призвала конкурентов делать так же
26.02.2026 [12:49],
Алексей Разин
По меркам мирового автопрома Xiaomi является молодым автопроизводителем, но она уже формально успела снять с производства первое поколение электромобиля SU7, который недавно пережил рестайлинг. По мнению руководства компании, частному бизнесу в Китае важно вкладывать больше средств в разработку новых технологий, и сама Xiaomi соответствующие расходы в ближайшие пять лет удвоит. 
Источник изображения: Xiaomi Подобные заявления прозвучали из уст основателя, генерального директора и председателя совета директоров Xiaomi Лэй Цзюня (Lei Jun) в ходе интервью ресурсу China News Service. «Главное преимущество частных компаний заключается в близости к рынку и пользователям. Они могут быстро реагировать и в сжатые сроки применять новые технологии в реальных сценариях, создавая масштабируемые продукты и решения», — пояснил глава Xiaomi. За предыдущие пять лет компания направила на исследования и разработки около $14,5 млрд, представив не только электромобили собственного производства, но и полупроводниковые компоненты, а также прочие передовые технологические новшества. В этом году Xiaomi собирается, по словам основателя, объединить процессор собственной разработки, ИИ-модель и операционную систему в одном устройстве. В последующие пять лет расходы на исследования и разработки будут удвоены до $29 млрд. Часть этих средств будет направлена на освоение сегмента робототехники. Слухи о намерениях Xiaomi создать своего человекоподобного робота курсируют уже давно. Прототип такого робота по имени CyberOne демонстрировался компанией ещё в 2022 году. В прошлом году Xiaomi представила свой первый 3-нм процессор для смартфонов. Компания также присматривается к сегменту систем стационарного хранения электроэнергии. Во-первых, он позволит найти применение отслужившим своё в электромобилях тяговым батареям. Во-вторых, подобные источники электроэнергии востребованы при строительстве центров обработки данных. Автопроизводители Li Auto и Xpeng также бросили дополнительные ресурсы на создание человекоподобных роботов. В последнем случае их массовое производство будет запущено к концу текущего года. Замена человека роботом уже сейчас способна окупиться всего за 10 недель
24.02.2026 [14:18],
Алексей Разин
Кому-то традиционные «страшилки» экспертов о близости момента замещения человека в некоторых профессиях роботами могут показаться угрозой достаточно отдалённой, но бывший представитель Citi Global Insights уверен, что программные и человекоподобные роботы уже сейчас способны делать за человека его работу с адекватной финансовой отдачей для бизнеса. 
Источник изображения: Unitree Robotics Для руководителей компаний, как пояснил в интервью CNBC бывший директор по инновациям и технологиям Citi Global Insights Роб Гарлик (Rob Garlick), приоритетом остаётся повышение прибыльности бизнеса, и живой сотрудник из плоти и крови уже сейчас способен проигрывать роботам по этим критериям. Искусственный интеллект, по его мнению, будет способен делать всё больше и больше, причём с уменьшающимися затратами, а потому он чаще начнёт замещать людей в качестве трудового ресурса. В течение ближайших пары десятилетий, по мнению эксперта, на планете станет больше подвижных роботов, чем людей трудоспособного возраста. Если же при этом учитывать ИИ-агентов, то данное количество «искусственных работников» вырастет многократно. Вместе с автономно управляемыми транспортными средствами, количество разного рода сервисных роботов к 2035 году достигнет 1,3 млрд штук, как считает Гарлик. Количество роботов, использующих ИИ, к 2050 году превысит 4 млрд штук. При действующих расценках на людской труд в отдельных экономиках мира замена человека роботом уже сейчас способна обеспечить быструю окупаемость. Например, робот стоимостью $15 000 при стоимости человеко-часа на уровне $41 выйдет на окупаемость за 3,8 недели, а при стоимости человеко-часа на уровне $7,25 он выйдет на окупаемость за 21,6 недели. Даже робот стоимостью $35 000 позволяет окупить себя менее чем за 9 недель при расходах на оплату труда человека в размере $41 в час. С такими показателями люди просто не смогут конкурировать, как отмечает Гарлик. Управляющий партнёр McKinsey & Company Боб Штернфелс (Bob Sternfels) ожидает, что в его компании количество реальных сотрудников и замещающих их ИИ-агентов сравняется уже через 18 месяцев. Уже сейчас на 40 000 человек в штате компании приходится 20 000 ИИ-агентов, хотя год назад их количество не превышало 3000 штук. Директор МВФ Кристалина Георгиева (Kristalina Georgieva) в прошлом месяце заявила, что искусственный интеллект уже ударяет по рынку труда, словно цунами, и большинство стран и представителей бизнеса к этому просто не готовы. Основатель Nvidia Дженсен Хуанг (Jensen Huang) находит при таких тенденциях поводы для оптимизма. Он убеждён, что в сфере производства компонентов для инфраструктуры ИИ зарплаты квалифицированных сотрудников будут измеряться шестизначными суммами в долларах США за год. Спрос на квалифицированных сантехников, электриков, строителей и металлургов на этапе бурного развития инфраструктуры заметно вырастет. |
© 1997—2026 Электронное периодическое издание "3ДНьюс" | Свидетельство о регистрации СМИ Эл ФС 77-22224
выдано Федеральной Службой по надзору за соблюдением законодательства в сфере массовых коммуникаций и охране культурного наследия
При цитировании документа ссылка на сайт с указанием автора обязательна. Полное заимствование документа является
нарушением
российского и международного законодательства и возможно только с согласия редакции 3DNews.







 MWC 2018
MWC 2018 2018
2018 Computex
Computex